 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState-aware Anti-drift Robust Correlation Tracking
Jun 28, 2018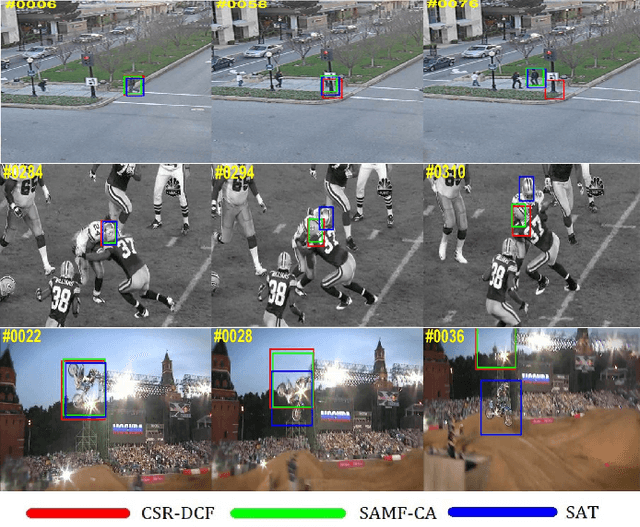
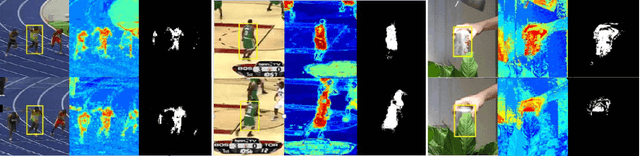
Correlation filter (CF) based trackers have aroused increasing attentions in visual tracking field due to the superior performance on several datasets while maintaining high running speed. For each frame, an ideal filter is trained in order to discriminate the target from its surrounding background. Considering that the target always undergoes external and internal interference during tracking procedure, the trained filter should take consideration of not only the external distractions but also the target appearance variation synchronously. To this end, we present a State-aware Anti-drift Tracker (SAT) in this paper, which jointly model the discrimination and reliability information in filter learning. Specifically, global context patches are incorporated into filter training stage to better distinguish the target from backgrounds. Meanwhile, a color-based reliable mask is learned to encourage the filter to focus on more reliable regions suitable for tracking. We show that the proposed optimization problem could be efficiently solved using Alternative Direction Method of Multipliers and fully carried out in Fourier domain. Extensive experiments are conducted on OTB-100 datasets to compare the SAT tracker (both hand-crafted feature and CNN feature) with other relevant state-of-the-art methods. Both quantitative and qualitative evaluations further demonstrate the effectiveness and robustness of the proposed work.
Correlation Tracking via Robust Region Proposals
Jun 14, 2018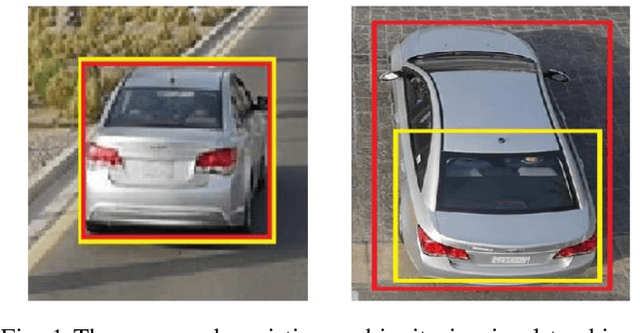
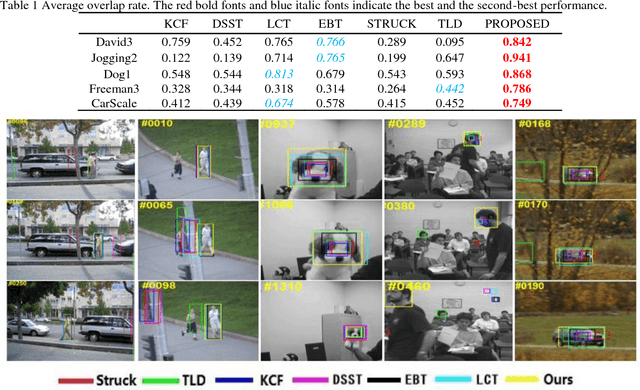
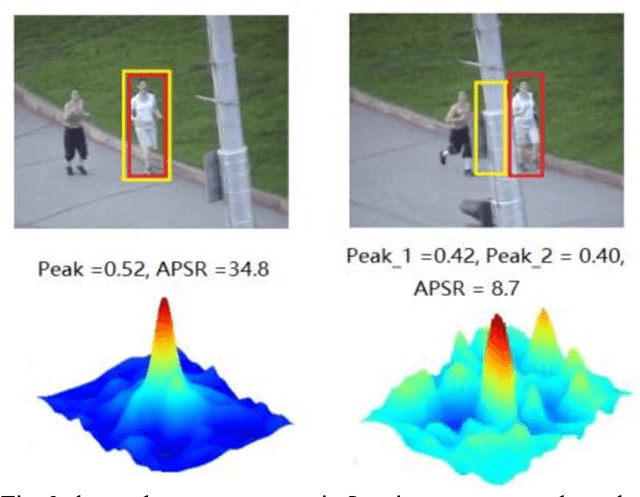
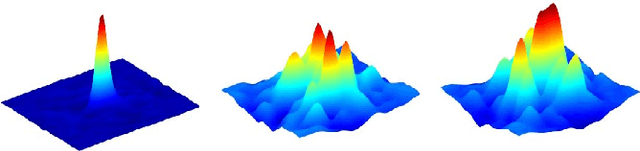
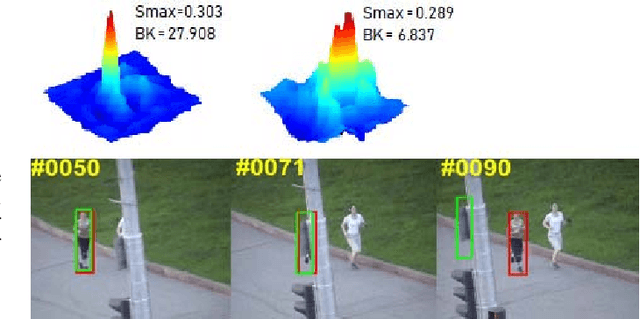
Recently, correlation filter-based trackers have received extensive attention due to their simplicity and superior speed. However, such trackers perform poorly when the target undergoes occlusion, viewpoint change or other challenging attributes due to pre-defined sampling strategy. To tackle these issues, in this paper, we propose an adaptive region proposal scheme to facilitate visual tracking. To be more specific, a novel tracking monitoring indicator is advocated to forecast tracking failure. Afterwards, we incorporate detection and scale proposals respectively, to recover from model drift as well as handle aspect ratio variation. We test the proposed algorithm on several challenging sequences, which have demonstrated that the proposed tracker performs favourably against state-of-the-art trackers.
Adaptive Feature Representation for Visual Tracking
May 12, 2017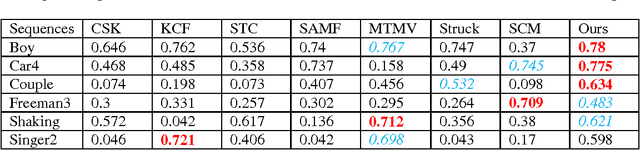
Robust feature representation plays significant role in visual tracking. However, it remains a challenging issue, since many factors may affect the experimental performance. The existing method which combine different features by setting them equally with the fixed weight could hardly solve the issues, due to the different statistical properties of different features across various of scenarios and attributes. In this paper, by exploiting the internal relationship among these features, we develop a robust method to construct a more stable feature representation. More specifically, we utilize a co-training paradigm to formulate the intrinsic complementary information of multi-feature template into the efficient correlation filter framework. We test our approach on challenging se- quences with illumination variation, scale variation, deformation etc. Experimental results demonstrate that the proposed method outperforms state-of-the-art methods favorably.