 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Feature Representation for Visual Tracking
Paper and Code
May 12, 2017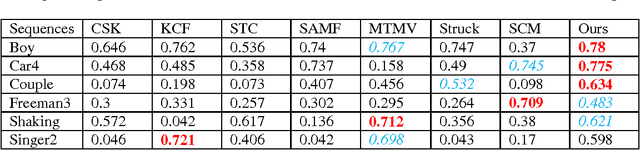
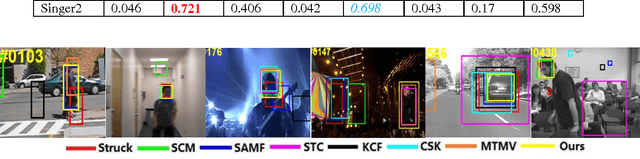
Robust feature representation plays significant role in visual tracking. However, it remains a challenging issue, since many factors may affect the experimental performance. The existing method which combine different features by setting them equally with the fixed weight could hardly solve the issues, due to the different statistical properties of different features across various of scenarios and attributes. In this paper, by exploiting the internal relationship among these features, we develop a robust method to construct a more stable feature representation. More specifically, we utilize a co-training paradigm to formulate the intrinsic complementary information of multi-feature template into the efficient correlation filter framework. We test our approach on challenging se- quences with illumination variation, scale variation, deformation etc. Experimental results demonstrate that the proposed method outperforms state-of-the-art methods favorably.