 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Signatures for Large-scale Visual Localization
May 07, 2020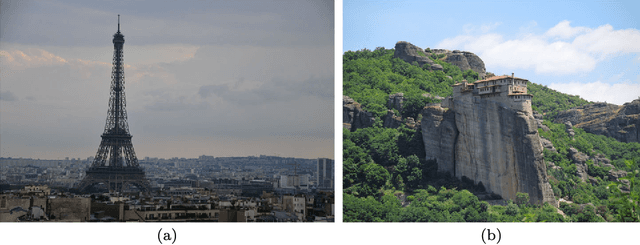
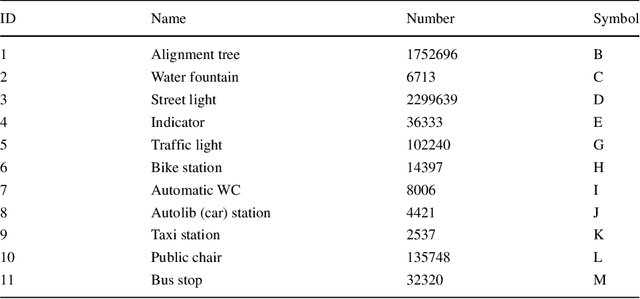
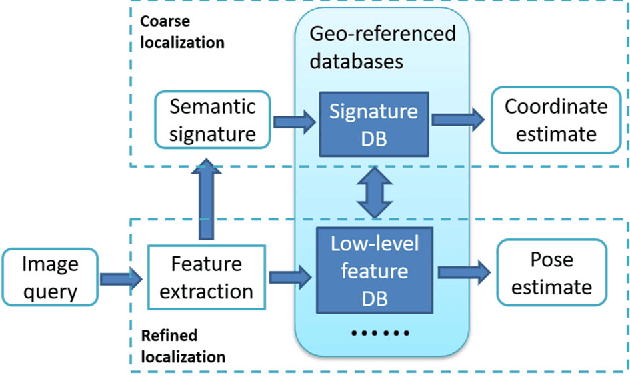
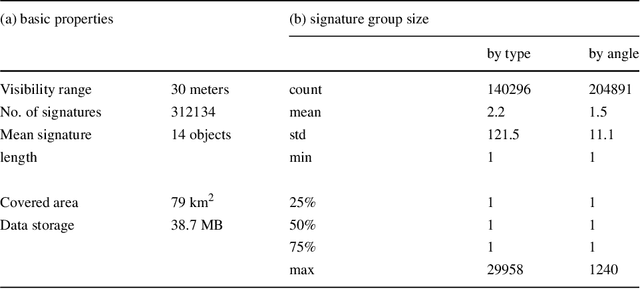
Visual localization is a useful alternative to standard localization techniques. It works by utilizing cameras. In a typical scenario, features are extracted from captured images and compared with geo-referenced databases. Location information is then inferred from the matching results. Conventional schemes mainly use low-level visual features. These approaches offer good accuracy but suffer from scalability issues. In order to assist localization in large urban areas, this work explores a different path by utilizing high-level semantic information. It is found that object information in a street view can facilitate localization. A novel descriptor scheme called "semantic signature" is proposed to summarize this information. A semantic signature consists of type and angle information of visible objects at a spatial location. Several metrics and protocols are proposed for signature comparison and retrieval. They illustrate different trade-offs between accuracy and complexity. Extensive simulation results confirm the potential of the proposed scheme in large-scale applications. This paper is an extended version of a conference paper in CBMI'18. A more efficient retrieval protocol is presented with additional experiment results.
* 12 pages, 22 figures, submitted to Multimedia Tools and Applications
A Synergistic Approach for Recovering Occlusion-Free Textured 3D Maps of Urban Facades from Heterogeneous Cartographic Data
Aug 29, 2013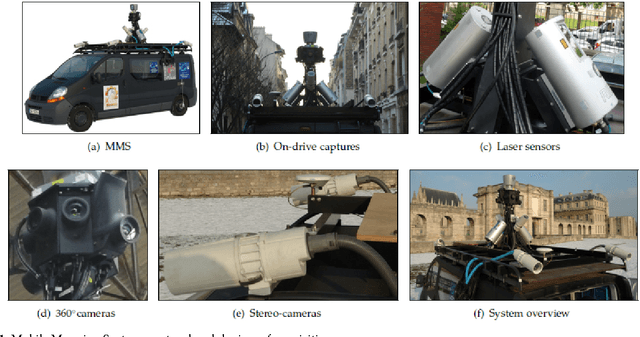
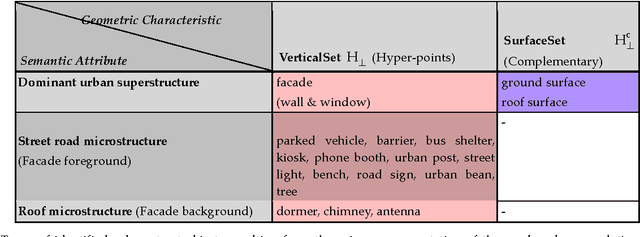
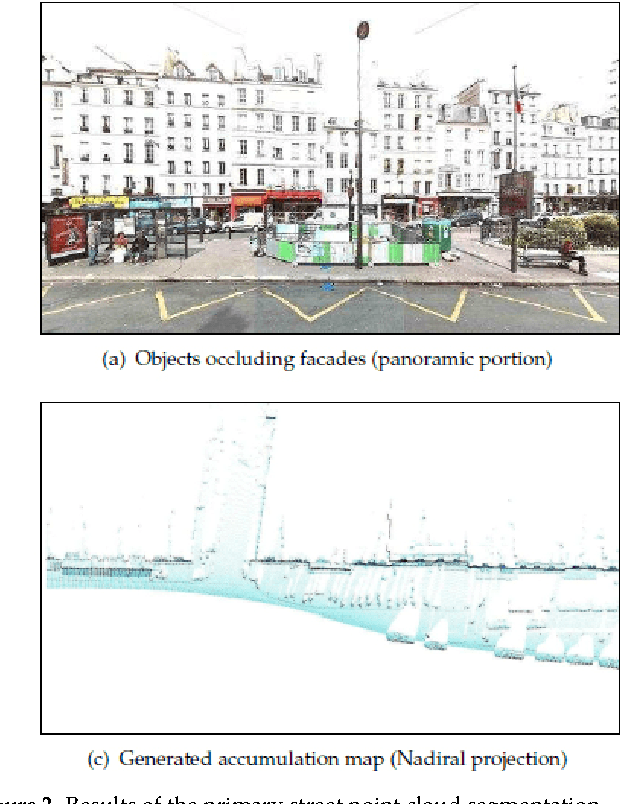
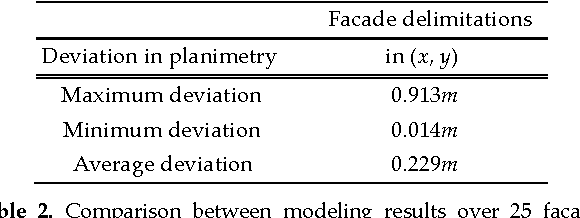
In this paper we present a practical approach for generating an occlusion-free textured 3D map of urban facades by the synergistic use of terrestrial images, 3D point clouds and area-based information. Particularly in dense urban environments, the high presence of urban objects in front of the facades causes significant difficulties for several stages in computational building modeling. Major challenges lie on the one hand in extracting complete 3D facade quadrilateral delimitations and on the other hand in generating occlusion-free facade textures. For these reasons, we describe a straightforward approach for completing and recovering facade geometry and textures by exploiting the data complementarity of terrestrial multi-source imagery and area-based information.