 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Signatures for Large-scale Visual Localization
Paper and Code
May 07, 2020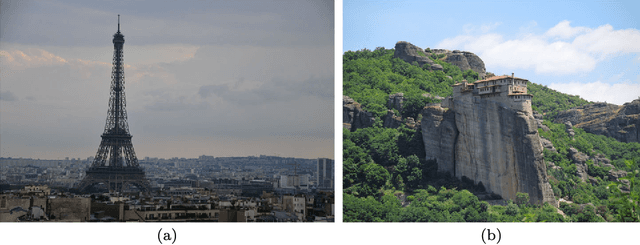
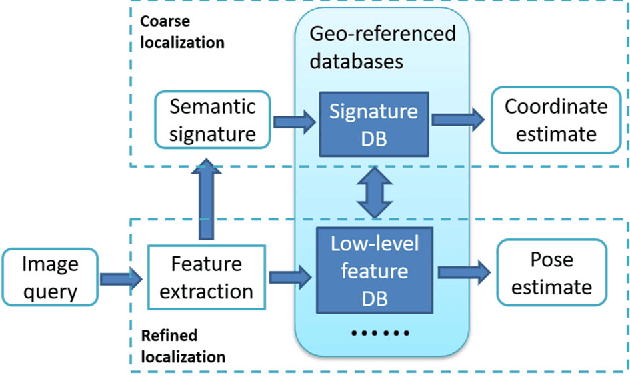
Visual localization is a useful alternative to standard localization techniques. It works by utilizing cameras. In a typical scenario, features are extracted from captured images and compared with geo-referenced databases. Location information is then inferred from the matching results. Conventional schemes mainly use low-level visual features. These approaches offer good accuracy but suffer from scalability issues. In order to assist localization in large urban areas, this work explores a different path by utilizing high-level semantic information. It is found that object information in a street view can facilitate localization. A novel descriptor scheme called "semantic signature" is proposed to summarize this information. A semantic signature consists of type and angle information of visible objects at a spatial location. Several metrics and protocols are proposed for signature comparison and retrieval. They illustrate different trade-offs between accuracy and complexity. Extensive simulation results confirm the potential of the proposed scheme in large-scale applications. This paper is an extended version of a conference paper in CBMI'18. A more efficient retrieval protocol is presented with additional experiment results.