 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn-to-Race Challenge 2022: Benchmarking Safe Learning and Cross-domain Generalisation in Autonomous Racing
May 10, 2022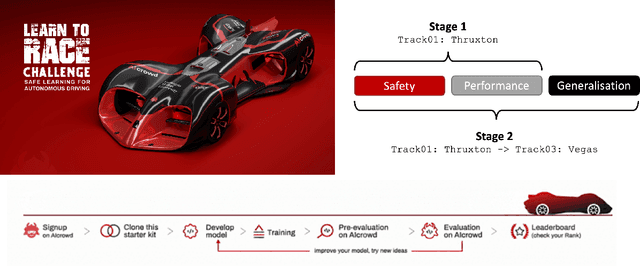
We present the results of our autonomous racing virtual challenge, based on the newly-released Learn-to-Race (L2R) simulation framework, which seeks to encourage interdisciplinary research in autonomous driving and to help advance the state of the art on a realistic benchmark. Analogous to racing being used to test cutting-edge vehicles, we envision autonomous racing to serve as a particularly challenging proving ground for autonomous agents as: (i) they need to make sub-second, safety-critical decisions in a complex, fast-changing environment; and (ii) both perception and control must be robust to distribution shifts, novel road features, and unseen obstacles. Thus, the main goal of the challenge is to evaluate the joint safety, performance, and generalisation capabilities of reinforcement learning agents on multi-modal perception, through a two-stage process. In the first stage of the challenge, we evaluate an autonomous agent's ability to drive as fast as possible, while adhering to safety constraints. In the second stage, we additionally require the agent to adapt to an unseen racetrack through safe exploration. In this paper, we describe the new L2R Task 2.0 benchmark, with refined metrics and baseline approaches. We also provide an overview of deployment, evaluation, and rankings for the inaugural instance of the L2R Autonomous Racing Virtual Challenge (supported by Carnegie Mellon University, Arrival Ltd., AICrowd, Amazon Web Services, and Honda Research), which officially used the new L2R Task 2.0 benchmark and received over 20,100 views, 437 active participants, 46 teams, and 733 model submissions -- from 88+ unique institutions, in 58+ different countries. Finally, we release leaderboard results from the challenge and provide description of the two top-ranking approaches in cross-domain model transfer, across multiple sensor configurations and simulated races.