 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeT-UDA: Temporal Unsupervised Domain Adaptation in Sequential Point Clouds
Sep 15, 2023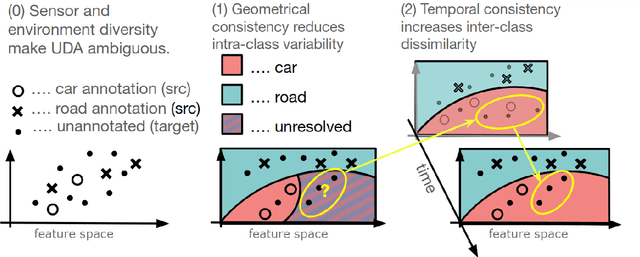
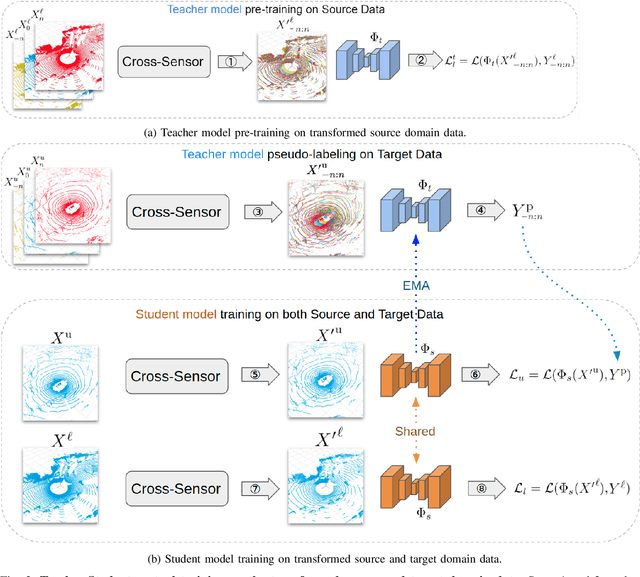
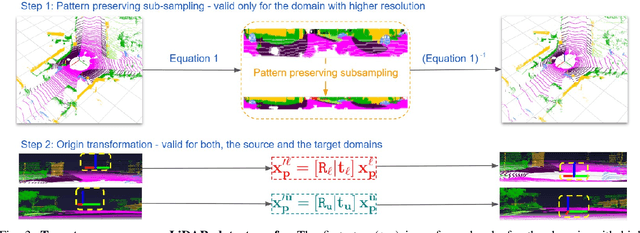
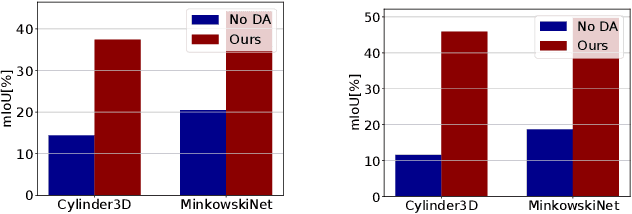
Deep perception models have to reliably cope with an open-world setting of domain shifts induced by different geographic regions, sensor properties, mounting positions, and several other reasons. Since covering all domains with annotated data is technically intractable due to the endless possible variations, researchers focus on unsupervised domain adaptation (UDA) methods that adapt models trained on one (source) domain with annotations available to another (target) domain for which only unannotated data are available. Current predominant methods either leverage semi-supervised approaches, e.g., teacher-student setup, or exploit privileged data, such as other sensor modalities or temporal data consistency. We introduce a novel domain adaptation method that leverages the best of both trends. Our approach combines input data's temporal and cross-sensor geometric consistency with the mean teacher method. Dubbed T-UDA for "temporal UDA", such a combination yields massive performance gains for the task of 3D semantic segmentation of driving scenes. Experiments are conducted on Waymo Open Dataset, nuScenes and SemanticKITTI, for two popular 3D point cloud architectures, Cylinder3D and MinkowskiNet. Our codes are publicly available at https://github.com/ctu-vras/T-UDA.
Teachers in concordance for pseudo-labeling of 3D sequential data
Jul 13, 2022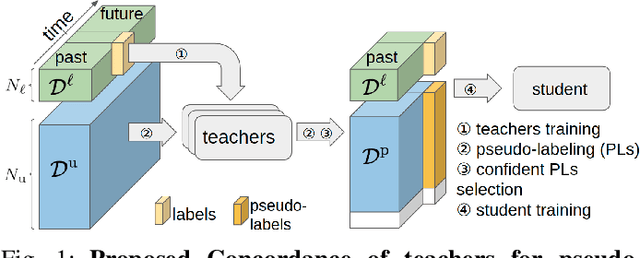
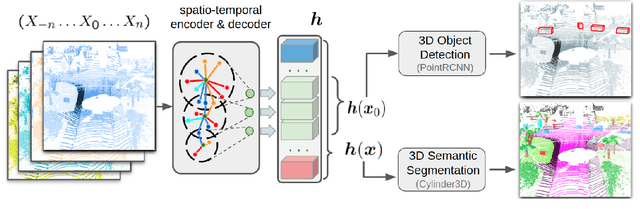
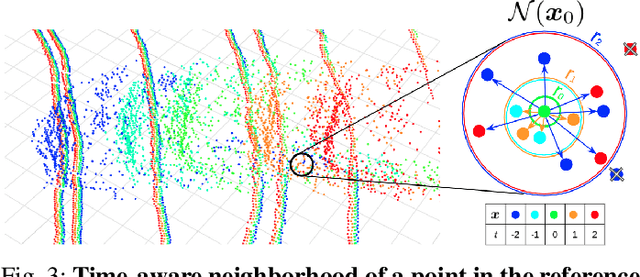
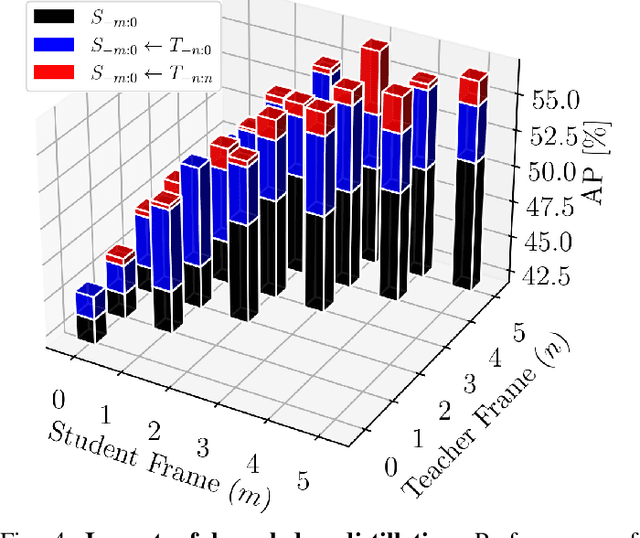
Automatic pseudo-labeling is a powerful tool to tap into large amounts of sequential unlabeled data. It is especially appealing in safety-critical applications of autonomous driving where performance requirements are extreme, datasets large, and manual labeling is very challenging. We propose to leverage the sequentiality of the captures to boost the pseudo-labeling technique in a teacher-student setup via training multiple teachers, each with access to different temporal information. This set of teachers, dubbed Concordance, provides higher quality pseudo-labels for the student training than standard methods. The output of multiple teachers is combined via a novel pseudo-label confidence-guided criterion. Our experimental evaluation focuses on the 3D point cloud domain in urban driving scenarios. We show the performance of our method applied to multiple model architectures with tasks of 3D semantic segmentation and 3D object detection on two benchmark datasets. Our method, using only 20% of manual labels, outperforms some of the fully supervised methods. Special performance boost is achieved for classes rarely appearing in the training data, e.g., bicycles and pedestrians. The implementation of our approach is publicly available at https://github.com/ctu-vras/T-Concord3D.