 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Artificial Neural Network Functionalized by Evolution
May 16, 2022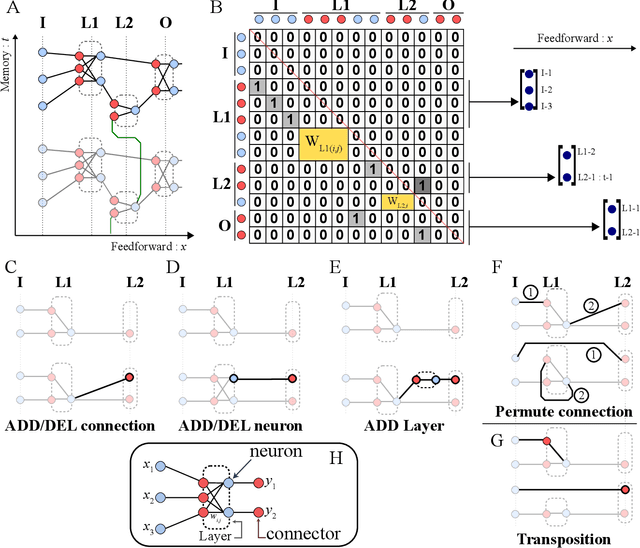
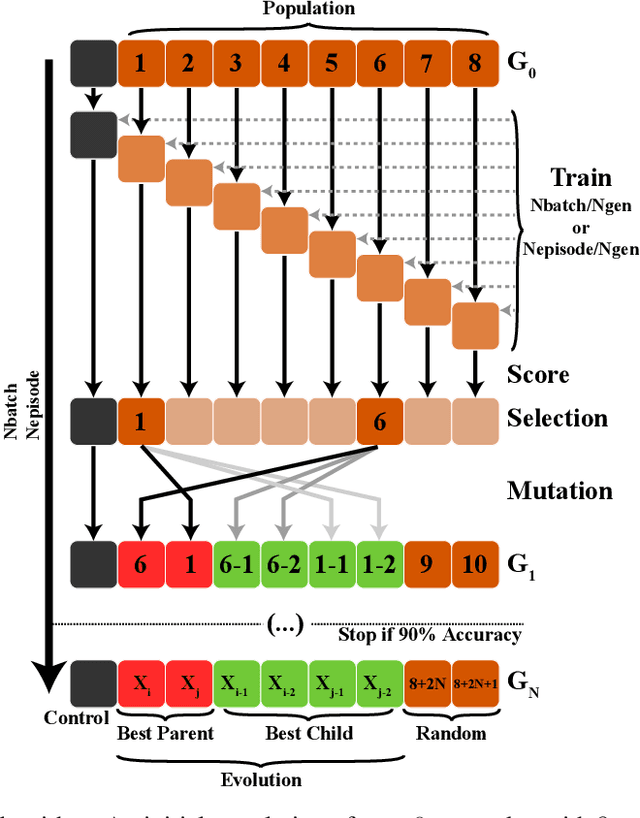

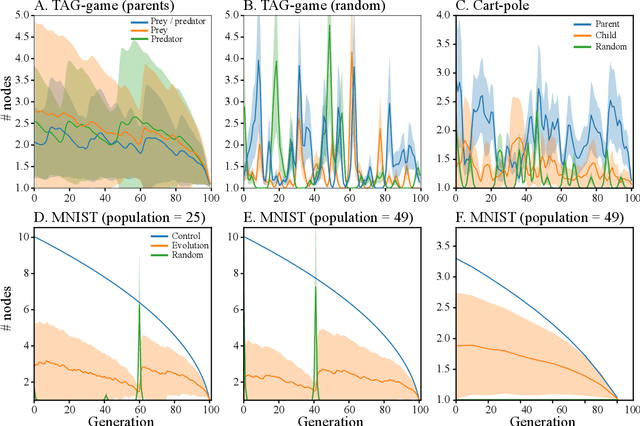
The topology of artificial neural networks has a significant effect on their performance. Characterizing efficient topology is a field of promising research in Artificial Intelligence. However, it is not a trivial task and it is mainly experimented on through convolutional neural networks. We propose a hybrid model which combines the tensor calculus of feed-forward neural networks with Pseudo-Darwinian mechanisms. This allows for finding topologies that are well adapted for elaboration of strategies, control problems or pattern recognition tasks. In particular, the model can provide adapted topologies at early evolutionary stages, and 'structural convergence', which can found applications in robotics, big-data and artificial life.
Addressing Failure Prediction by Learning Model Confidence
Oct 26, 2019
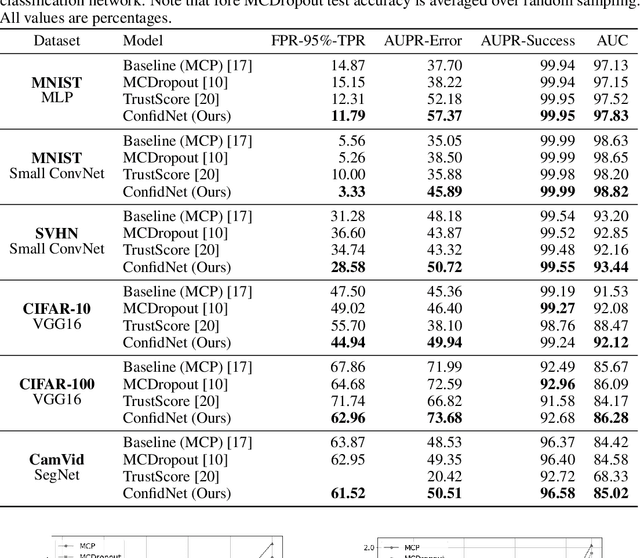
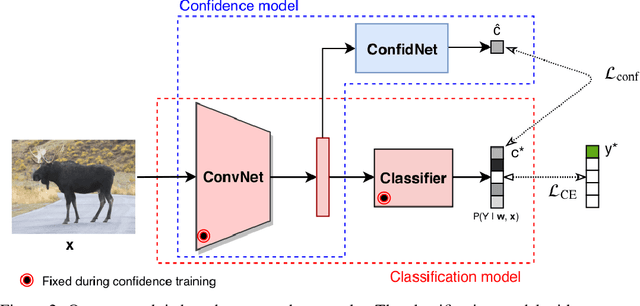
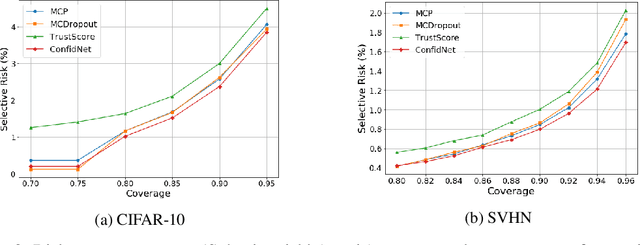
Assessing reliably the confidence of a deep neural network and predicting its failures is of primary importance for the practical deployment of these models. In this paper, we propose a new target criterion for model confidence, corresponding to the True Class Probability (TCP). We show how using the TCP is more suited than relying on the classic Maximum Class Probability (MCP). We provide in addition theoretical guarantees for TCP in the context of failure prediction. Since the true class is by essence unknown at test time, we propose to learn TCP criterion on the training set, introducing a specific learning scheme adapted to this context. Extensive experiments are conducted for validating the relevance of the proposed approach. We study various network architectures, small and large scale datasets for image classification and semantic segmentation. We show that our approach consistently outperforms several strong methods, from MCP to Bayesian uncertainty, as well as recent approaches specifically designed for failure prediction.
Non-Adaptive Policies for 20 Questions Target Localization
May 02, 2015
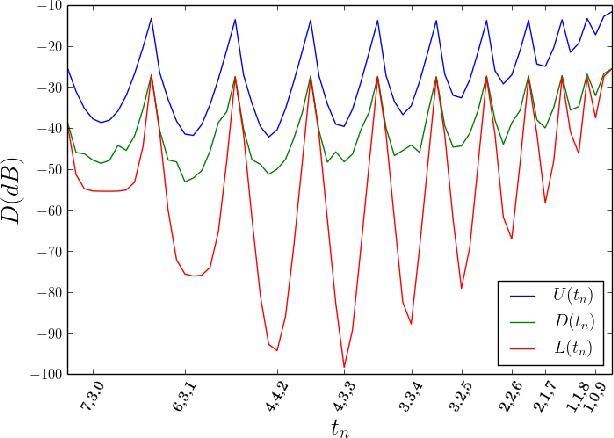
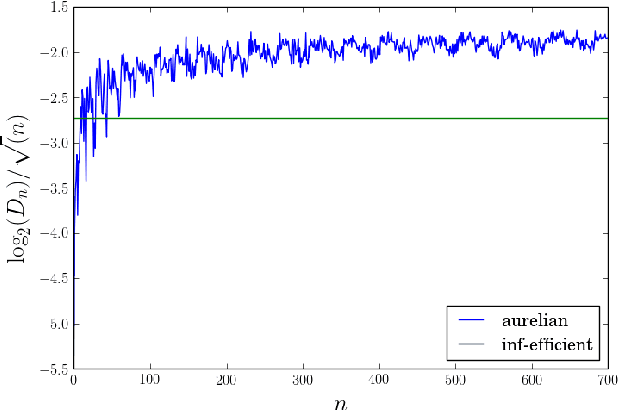
The problem of target localization with noise is addressed. The target is a sample from a continuous random variable with known distribution and the goal is to locate it with minimum mean squared error distortion. The localization scheme or policy proceeds by queries, or questions, weather or not the target belongs to some subset as it is addressed in the 20-question framework. These subsets are not constrained to be intervals and the answers to the queries are noisy. While this situation is well studied for adaptive querying, this paper is focused on the non adaptive querying policies based on dyadic questions. The asymptotic minimum achievable distortion under such policies is derived. Furthermore, a policy named the Aurelian1 is exhibited which achieves asymptotically this distortion.