 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROCK: A variational formulation for occupation kernel methods in Reproducing Kernel Hilbert Spaces
Mar 18, 2025



We present a Representer Theorem result for a large class of weak formulation problems. We provide examples of applications of our formulation both in traditional machine learning and numerical methods as well as in new and emerging techniques. Finally we apply our formulation to generalize the multivariate occupation kernel (MOCK) method for learning dynamical systems from data proposing the more general Riesz Occupation Kernel (ROCK) method. Our generalized methods are both more computationally efficient and performant on most of the benchmarks we test against.
The Stochastic Occupation Kernel Method for System Identification
Jun 21, 2024


The method of occupation kernels has been used to learn ordinary differential equations from data in a non-parametric way. We propose a two-step method for learning the drift and diffusion of a stochastic differential equation given snapshots of the process. In the first step, we learn the drift by applying the occupation kernel algorithm to the expected value of the process. In the second step, we learn the diffusion given the drift using a semi-definite program. Specifically, we learn the diffusion squared as a non-negative function in a RKHS associated with the square of a kernel. We present examples and simulations.
Learning High-Dimensional Nonparametric Differential Equations via Multivariate Occupation Kernel Functions
Jun 16, 2023
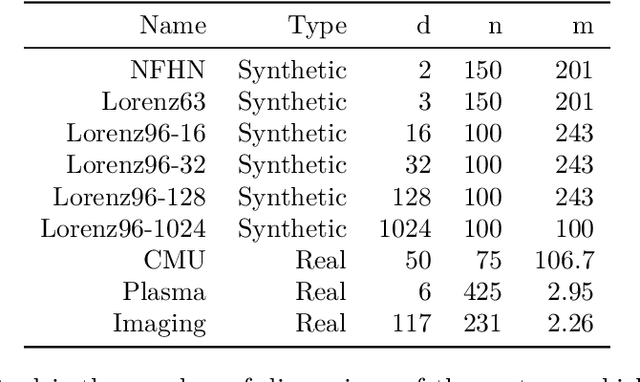

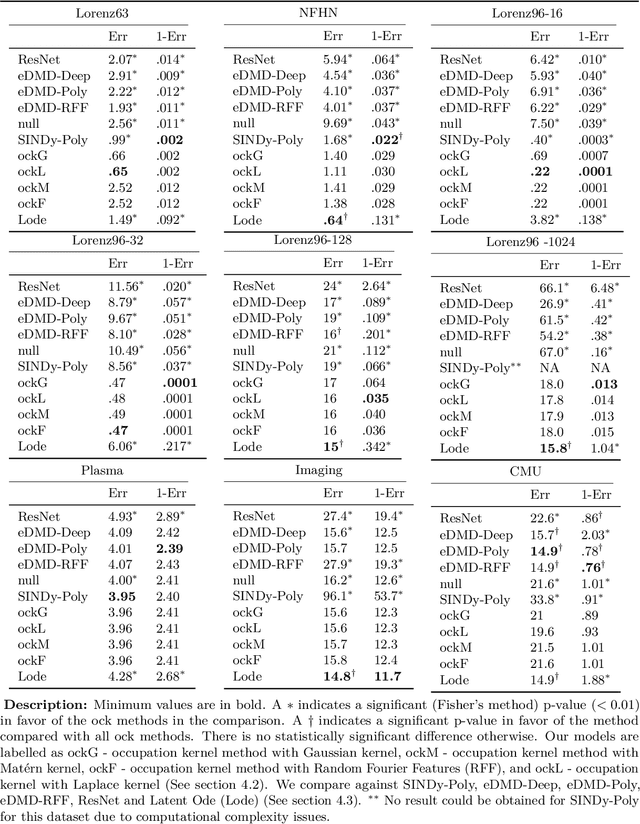
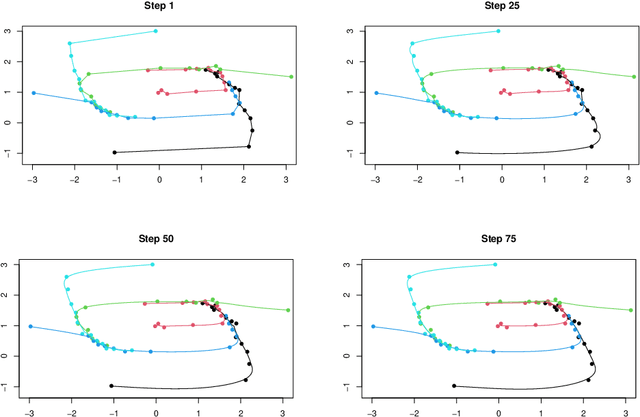
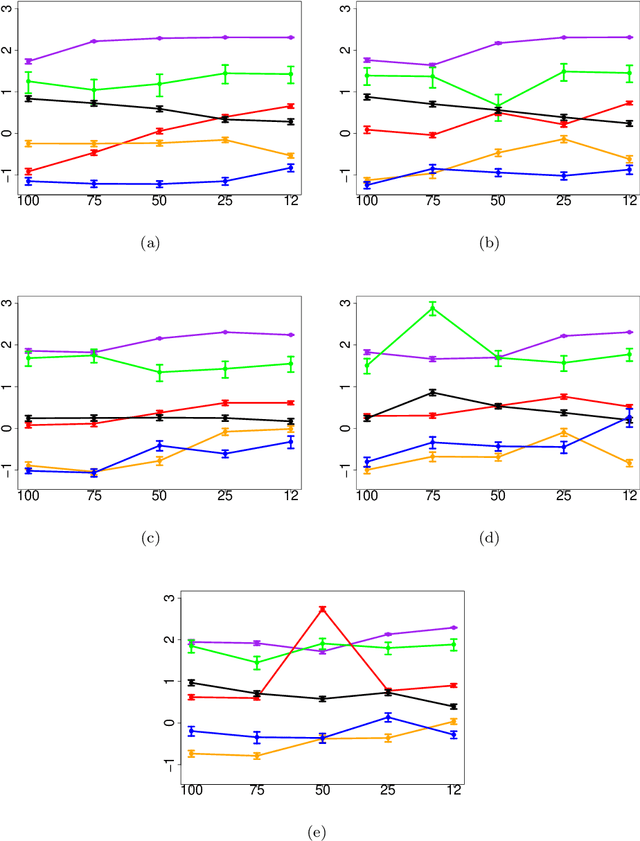
Learning a nonparametric system of ordinary differential equations (ODEs) from $n$ trajectory snapshots in a $d$-dimensional state space requires learning $d$ functions of $d$ variables. Explicit formulations scale quadratically in $d$ unless additional knowledge about system properties, such as sparsity and symmetries, is available. In this work, we propose a linear approach to learning using the implicit formulation provided by vector-valued Reproducing Kernel Hilbert Spaces. By rewriting the ODEs in a weaker integral form, which we subsequently minimize, we derive our learning algorithm. The minimization problem's solution for the vector field relies on multivariate occupation kernel functions associated with the solution trajectories. We validate our approach through experiments on highly nonlinear simulated and real data, where $d$ may exceed 100. We further demonstrate the versatility of the proposed method by learning a nonparametric first order quasilinear partial differential equation.
Learning Nonparametric Ordinary differential Equations: Application to Sparse and Noisy Data
Jun 30, 2022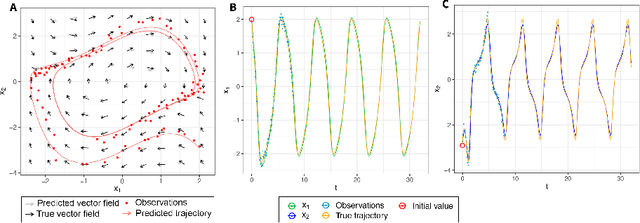
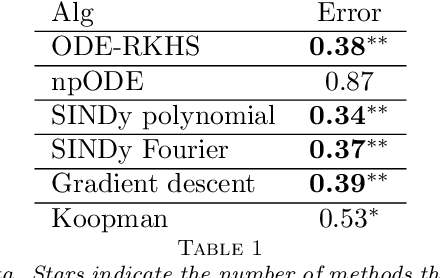
Learning nonparametric systems of Ordinary Differential Equations (ODEs) $\dot x = f(t,x)$ from noisy and sparse data is an emerging machine learning topic. We use the well-developed theory of Reproducing Kernel Hilbert Spaces (RKHS) to define candidates for $f$ for which the solution of the ODE exists and is unique. Learning $f$ consists of solving a constrained optimization problem in an RKHS. We propose a penalty method that iteratively uses the Representer theorem and Euler approximations to provide a numerical solution. We prove a generalization bound for the $L^2$ distance between $x$ and its estimator. Experiments are provided for the FitzHugh Nagumo oscillator and for the prediction of the Amyloid level in the cortex of aging subjects. In both cases, we show competitive results when compared with the state of the art.
Non-Adaptive Policies for 20 Questions Target Localization
May 02, 2015
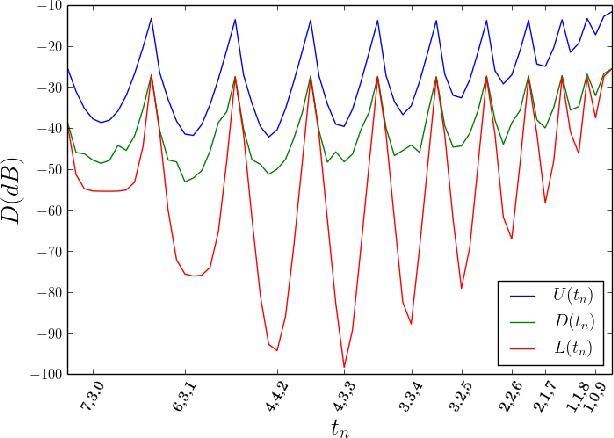
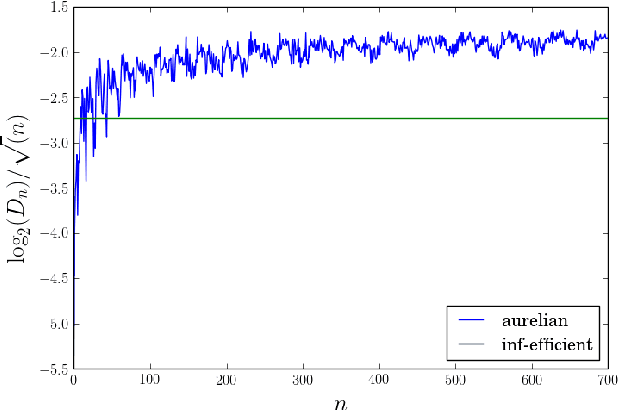
The problem of target localization with noise is addressed. The target is a sample from a continuous random variable with known distribution and the goal is to locate it with minimum mean squared error distortion. The localization scheme or policy proceeds by queries, or questions, weather or not the target belongs to some subset as it is addressed in the 20-question framework. These subsets are not constrained to be intervals and the answers to the queries are noisy. While this situation is well studied for adaptive querying, this paper is focused on the non adaptive querying policies based on dyadic questions. The asymptotic minimum achievable distortion under such policies is derived. Furthermore, a policy named the Aurelian1 is exhibited which achieves asymptotically this distortion.