 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePEFA-AI: Advancing Open-source LLMs for RTL generation using Progressive Error Feedback Agentic-AI
Nov 06, 2025We present an agentic flow consisting of multiple agents that combine specialized LLMs and hardware simulation tools to collaboratively complete the complex task of Register Transfer Level (RTL) generation without human intervention. A key feature of the proposed flow is the progressive error feedback system of agents (PEFA), a self-correcting mechanism that leverages iterative error feedback to progressively increase the complexity of the approach. The generated RTL includes checks for compilation, functional correctness, and synthesizable constructs. To validate this adaptive approach to code generation, benchmarking is performed using two opensource natural language-to-RTL datasets. We demonstrate the benefits of the proposed approach implemented on an open source agentic framework, using both open- and closed-source LLMs, effectively bridging the performance gap between them. Compared to previously published methods, our approach sets a new benchmark, providing state-of-the-art pass rates while being efficient in token counts.
Spatio-Temporal Pyramid Graph Convolutions for Human Action Recognition and Postural Assessment
Dec 07, 2019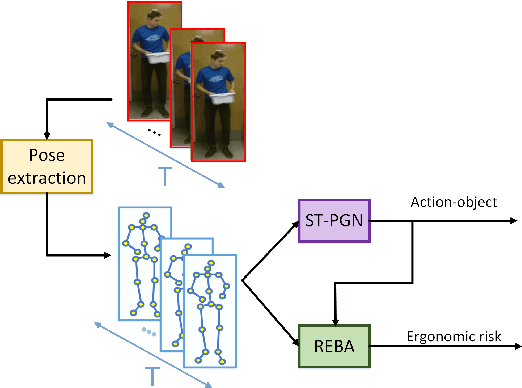
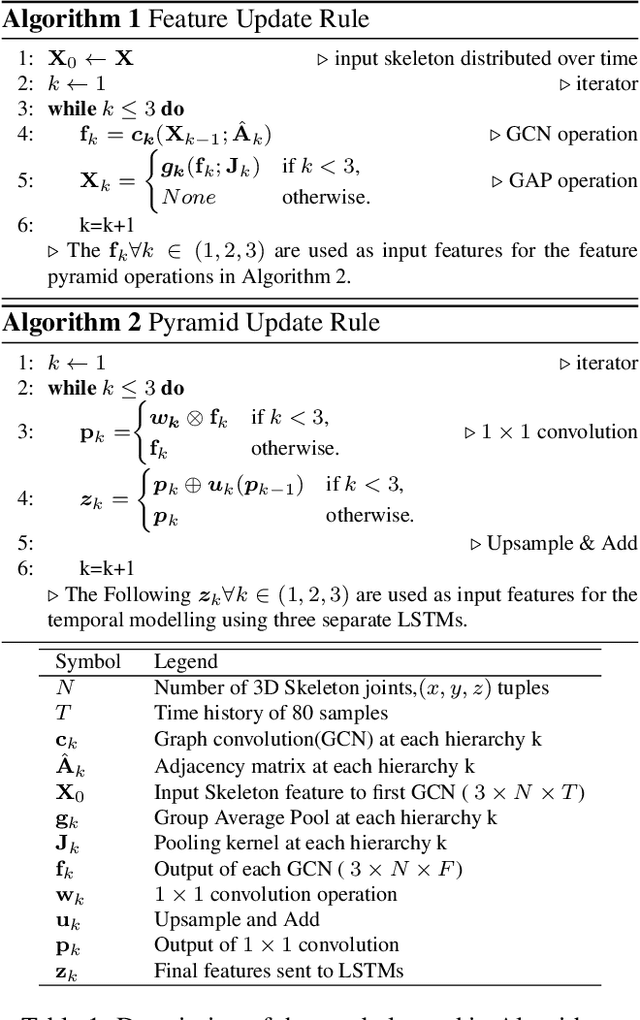


Recognition of human actions and associated interactions with objects and the environment is an important problem in computer vision due to its potential applications in a variety of domains. The most versatile methods can generalize to various environments and deal with cluttered backgrounds, occlusions, and viewpoint variations. Among them, methods based on graph convolutional networks that extract features from the skeleton have demonstrated promising performance. In this paper, we propose a novel Spatio-Temporal Pyramid Graph Convolutional Network (ST-PGN) for online action recognition for ergonomic risk assessment that enables the use of features from all levels of the skeleton feature hierarchy. The proposed algorithm outperforms state-of-art action recognition algorithms tested on two public benchmark datasets typically used for postural assessment (TUM and UW-IOM). We also introduce a pipeline to enhance postural assessment methods with online action recognition techniques. Finally, the proposed algorithm is integrated with a traditional ergonomic risk index (REBA) to demonstrate the potential value for assessment of musculoskeletal disorders in occupational safety.
Temporal Multimodal Fusion for Driver Behavior Prediction Tasks using Gated Recurrent Fusion Units
Oct 01, 2019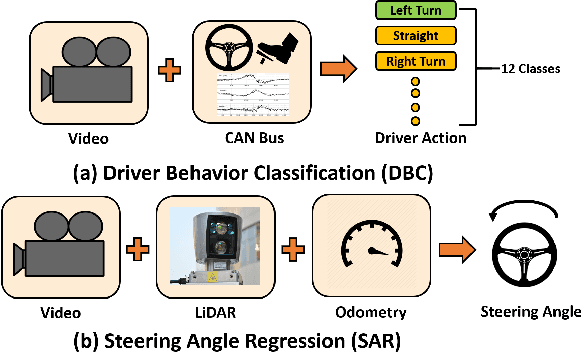
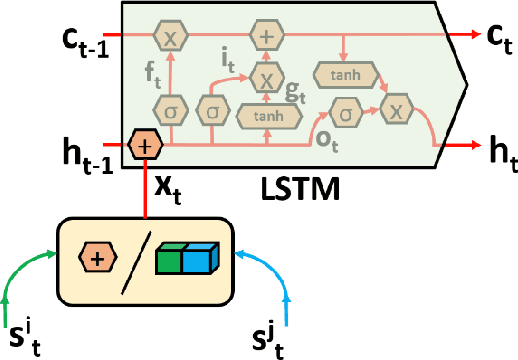

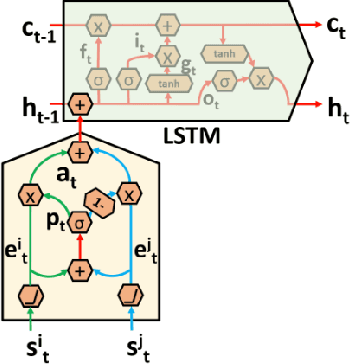
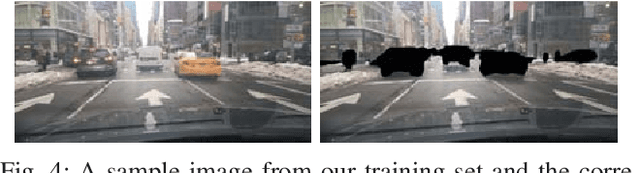
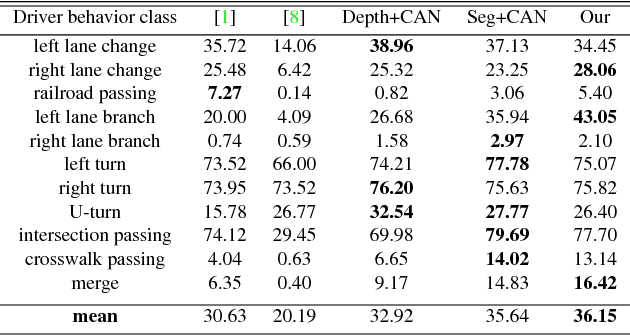
The Tactical Driver Behavior modeling problem requires understanding of driver actions in complicated urban scenarios from a rich multi modal signals including video, LiDAR and CAN bus data streams. However, the majority of deep learning research is focused either on learning the vehicle/environment state (sensor fusion) or the driver policy (from temporal data), but not both. Learning both tasks end-to-end offers the richest distillation of knowledge, but presents challenges in formulation and successful training. In this work, we propose promising first steps in this direction. Inspired by the gating mechanisms in LSTM, we propose gated recurrent fusion units (GRFU) that learn fusion weighting and temporal weighting simultaneously. We demonstrate it's superior performance over multimodal and temporal baselines in supervised regression and classification tasks, all in the realm of autonomous navigation. We note a 10% improvement in the mAP score over state-of-the-art for tactical driver behavior classification in HDD dataset and a 20% drop in overall Mean squared error for steering action regression on TORCS dataset.
Dynamic Traffic Scene Classification with Space-Time Coherence
May 29, 2019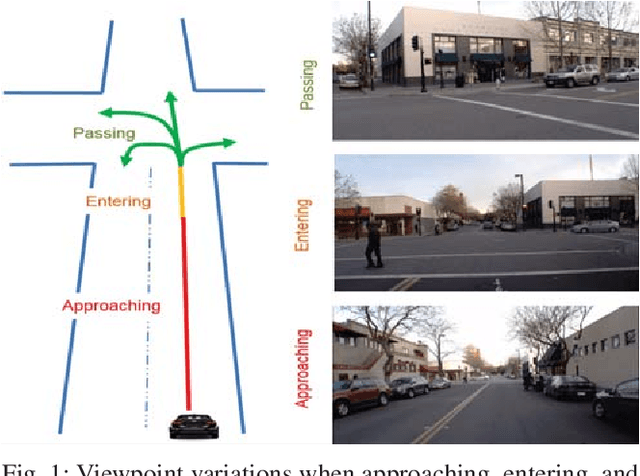
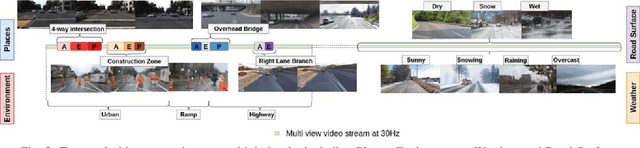
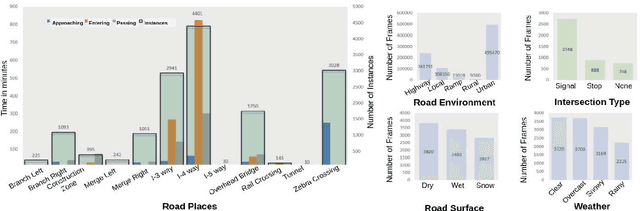
This paper examines the problem of dynamic traffic scene classification under space-time variations in viewpoint that arise from video captured on-board a moving vehicle. Solutions to this problem are important for realization of effective driving assistance technologies required to interpret or predict road user behavior. Currently, dynamic traffic scene classification has not been adequately addressed due to a lack of benchmark datasets that consider spatiotemporal evolution of traffic scenes resulting from a vehicle's ego-motion. This paper has three main contributions. First, an annotated dataset is released to enable dynamic scene classification that includes 80 hours of diverse high quality driving video data clips collected in the San Francisco Bay area. The dataset includes temporal annotations for road places, road types, weather, and road surface conditions. Second, we introduce novel and baseline algorithms that utilize semantic context and temporal nature of the dataset for dynamic classification of road scenes. Finally, we showcase algorithms and experimental results that highlight how extracted features from scene classification serve as strong priors and help with tactical driver behavior understanding. The results show significant improvement from previously reported driving behavior detection baselines in the literature.
Semi-supervised Learning: Fusion of Self-supervised, Supervised Learning, and Multimodal Cues for Tactical Driver Behavior Detection
Jul 02, 2018
In this paper, we presented a preliminary study for tactical driver behavior detection from untrimmed naturalistic driving recordings. While supervised learning based detection is a common approach, it suffers when labeled data is scarce. Manual annotation is both time-consuming and expensive. To emphasize this problem, we experimented on a 104-hour real-world naturalistic driving dataset with a set of predefined driving behaviors annotated. There are three challenges in the dataset. First, predefined driving behaviors are sparse in a naturalistic driving setting. Second, the distribution of driving behaviors is long-tail. Third, a huge intra-class variation is observed. To address these issues, recent self-supervised and supervised learning and fusion of multimodal cues are leveraged into our architecture design. Preliminary experiments and discussions are reported.