 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInsect-Foundation: A Foundation Model and Large-scale 1M Dataset for Visual Insect Understanding
Nov 26, 2023



In precision agriculture, the detection and recognition of insects play an essential role in the ability of crops to grow healthy and produce a high-quality yield. The current machine vision model requires a large volume of data to achieve high performance. However, there are approximately 5.5 million different insect species in the world. None of the existing insect datasets can cover even a fraction of them due to varying geographic locations and acquisition costs. In this paper, we introduce a novel ``Insect-1M'' dataset, a game-changing resource poised to revolutionize insect-related foundation model training. Covering a vast spectrum of insect species, our dataset, including 1 million images with dense identification labels of taxonomy hierarchy and insect descriptions, offers a panoramic view of entomology, enabling foundation models to comprehend visual and semantic information about insects like never before. Then, to efficiently establish an Insect Foundation Model, we develop a micro-feature self-supervised learning method with a Patch-wise Relevant Attention mechanism capable of discerning the subtle differences among insect images. In addition, we introduce Description Consistency loss to improve micro-feature modeling via insect descriptions. Through our experiments, we illustrate the effectiveness of our proposed approach in insect modeling and achieve State-of-the-Art performance on standard benchmarks of insect-related tasks. Our Insect Foundation Model and Dataset promise to empower the next generation of insect-related vision models, bringing them closer to the ultimate goal of precision agriculture.
CoMaL: Conditional Maximum Likelihood Approach to Self-supervised Domain Adaptation in Long-tail Semantic Segmentation
Apr 14, 2023



The research in self-supervised domain adaptation in semantic segmentation has recently received considerable attention. Although GAN-based methods have become one of the most popular approaches to domain adaptation, they have suffered from some limitations. They are insufficient to model both global and local structures of a given image, especially in small regions of tail classes. Moreover, they perform bad on the tail classes containing limited number of pixels or less training samples. In order to address these issues, we present a new self-supervised domain adaptation approach to tackle long-tail semantic segmentation in this paper. Firstly, a new metric is introduced to formulate long-tail domain adaptation in the segmentation problem. Secondly, a new Conditional Maximum Likelihood (CoMaL) approach in an autoregressive framework is presented to solve the problem of long-tail domain adaptation. Although other segmentation methods work under the pixel independence assumption, the long-tailed pixel distributions in CoMaL are generally solved in the context of structural dependency, as that is more realistic. Finally, the proposed method is evaluated on popular large-scale semantic segmentation benchmarks, i.e., "SYNTHIA to Cityscapes" and "GTA to Cityscapes", and outperforms the prior methods by a large margin in both the standard and the proposed evaluation protocols.
CROVIA: Seeing Drone Scenes from Car Perspective via Cross-View Adaptation
Apr 14, 2023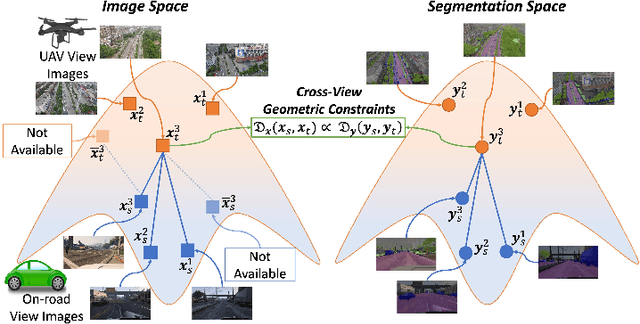

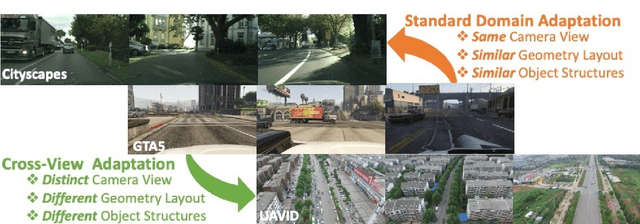

Understanding semantic scene segmentation of urban scenes captured from the Unmanned Aerial Vehicles (UAV) perspective plays a vital role in building a perception model for UAV. With the limitations of large-scale densely labeled data, semantic scene segmentation for UAV views requires a broad understanding of an object from both its top and side views. Adapting from well-annotated autonomous driving data to unlabeled UAV data is challenging due to the cross-view differences between the two data types. Our work proposes a novel Cross-View Adaptation (CROVIA) approach to effectively adapt the knowledge learned from on-road vehicle views to UAV views. First, a novel geometry-based constraint to cross-view adaptation is introduced based on the geometry correlation between views. Second, cross-view correlations from image space are effectively transferred to segmentation space without any requirement of paired on-road and UAV view data via a new Geometry-Constraint Cross-View (GeiCo) loss. Third, the multi-modal bijective networks are introduced to enforce the global structural modeling across views. Experimental results on new cross-view adaptation benchmarks introduced in this work, i.e., SYNTHIA to UAVID and GTA5 to UAVID, show the State-of-the-Art (SOTA) performance of our approach over prior adaptation methods
OTAdapt: Optimal Transport-based Approach For Unsupervised Domain Adaptation
May 22, 2022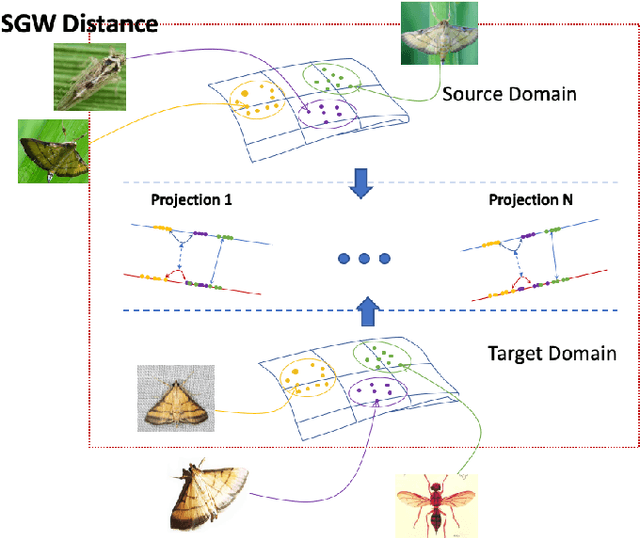
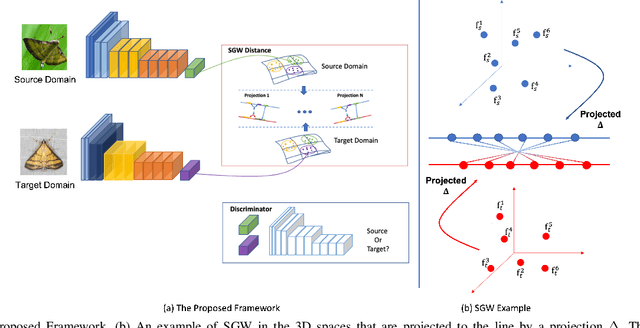
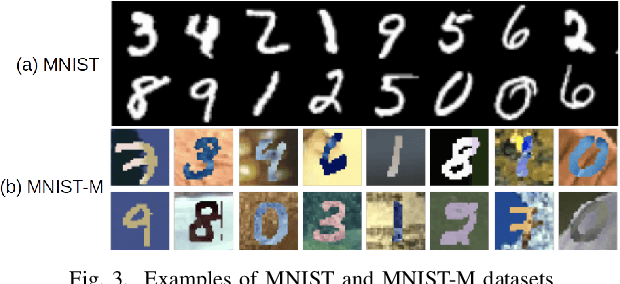
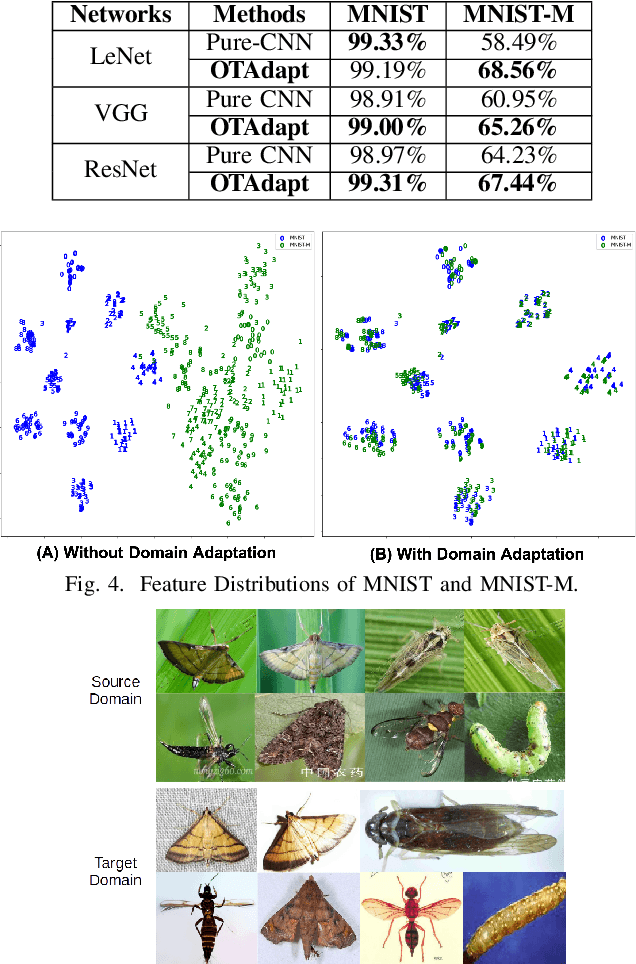
Unsupervised domain adaptation is one of the challenging problems in computer vision. This paper presents a novel approach to unsupervised domain adaptations based on the optimal transport-based distance. Our approach allows aligning target and source domains without the requirement of meaningful metrics across domains. In addition, the proposal can associate the correct mapping between source and target domains and guarantee a constraint of topology between source and target domains. The proposed method is evaluated on different datasets in various problems, i.e. (i) digit recognition on MNIST, MNIST-M, USPS datasets, (ii) Object recognition on Amazon, Webcam, DSLR, and VisDA datasets, (iii) Insect Recognition on the IP102 dataset. The experimental results show that our proposed method consistently improves performance accuracy. Also, our framework could be incorporated with any other CNN frameworks within an end-to-end deep network design for recognition problems to improve their performance.