 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Subgraph Matching
Jul 06, 2020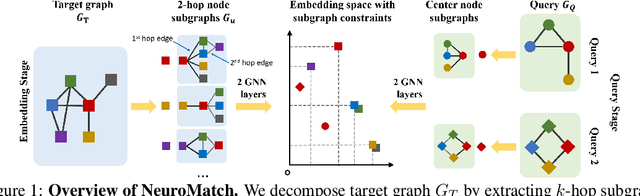
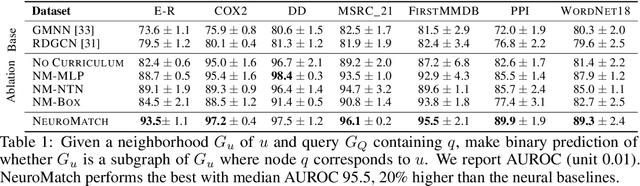
Subgraph matching is the problem of determining the presence and location(s) of a given query graph in a large target graph. Despite being an NP-complete problem, the subgraph matching problem is crucial in domains ranging from network science and database systems to biochemistry and cognitive science. However, existing techniques based on combinatorial matching and integer programming cannot handle matching problems with both large target and query graphs. Here we propose NeuroMatch, an accurate, efficient, and robust neural approach to subgraph matching. NeuroMatch decomposes query and target graphs into small subgraphs and embeds them using graph neural networks. Trained to capture geometric constraints corresponding to subgraph relations, NeuroMatch then efficiently performs subgraph matching directly in the embedding space. Experiments demonstrate NeuroMatch is 100x faster than existing combinatorial approaches and 18% more accurate than existing approximate subgraph matching methods.
String Diagrams for Assembly Planning
Sep 23, 2019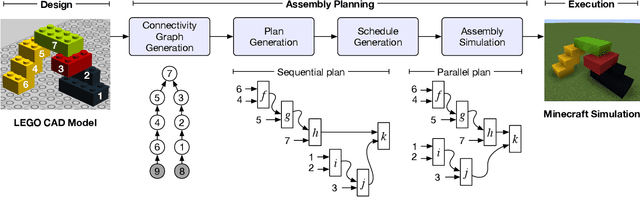
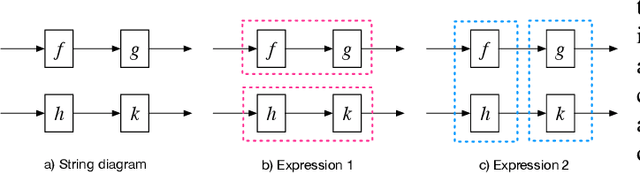
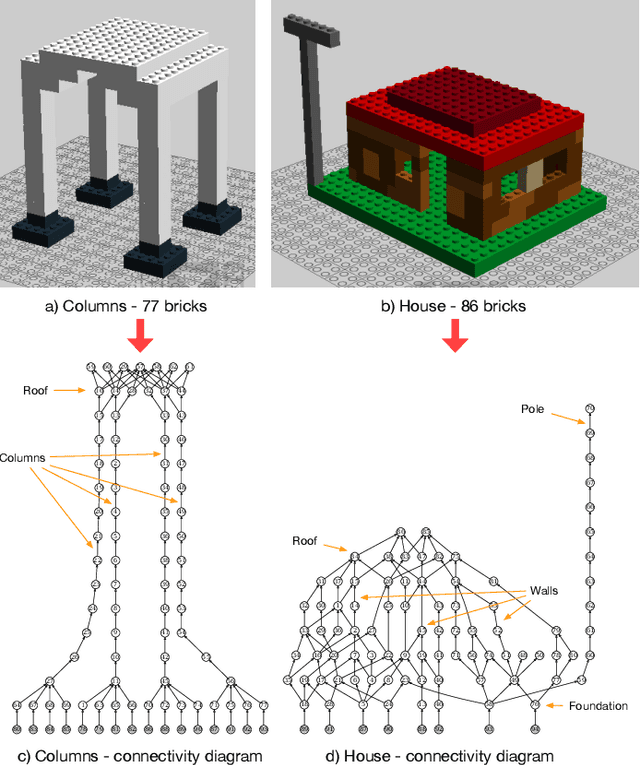
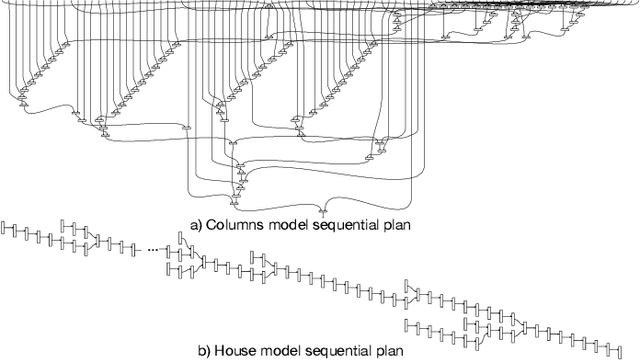
Assembly planning is a difficult problem for companies. Many disciplines such as design, planning, scheduling, and manufacturing execution need to be carefully engineered and coordinated to create successful product assembly plans. Recent research in the field of design for assembly has proposed new methodologies to design product structures in such a way that their assembly is easier. However, present assembly planning approaches lack the engineering tool support to capture all the constraints associated to assembly planning in a unified manner. This paper proposes CompositionalPlanning, a string diagram based framework for assembly planning. In the proposed framework, string diagrams and their compositional properties serve as the foundation for an engineering tool where CAD designs interact with planning and scheduling algorithms to automatically create high-quality assembly plans. These assembly plans are then executed in simulation to measure their performance and to visualize their key build characteristics. We demonstrate the versatility of this approach in the LEGO assembly domain. We developed two reference LEGO CAD models that are processed by CompositionalPlanning's algorithmic pipeline. We compare sequential and parallel assembly plans in a Minecraft simulation and show that the time-to-build performance can be optimized by our algorithms.
Graph Representation Ensemble Learning
Sep 12, 2019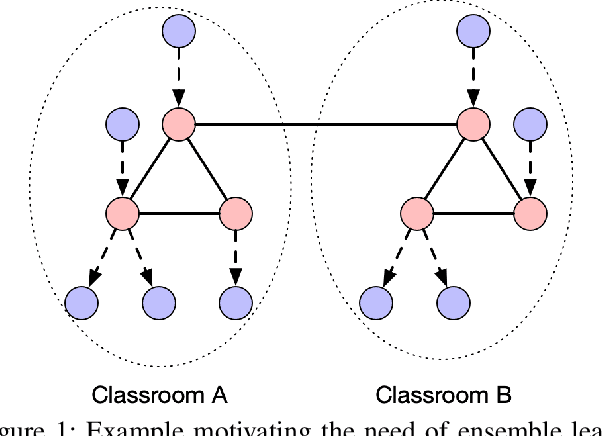
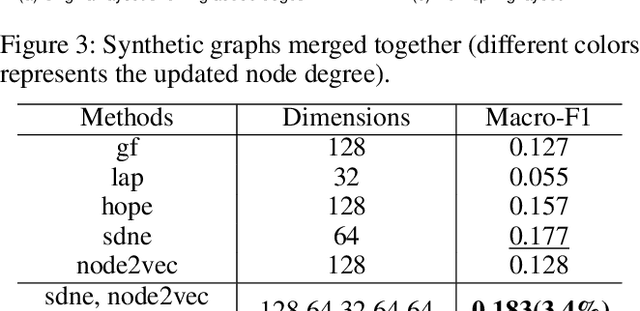
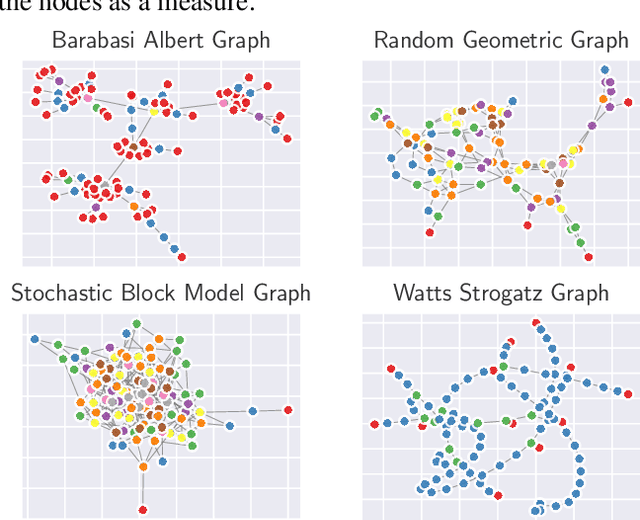
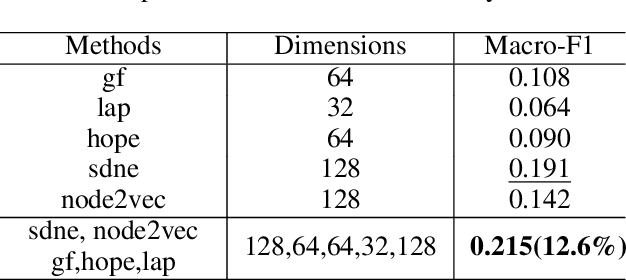
Representation learning on graphs has been gaining attention due to its wide applicability in predicting missing links, and classifying and recommending nodes. Most embedding methods aim to preserve certain properties of the original graph in the low dimensional space. However, real world graphs have a combination of several properties which are difficult to characterize and capture by a single approach. In this work, we introduce the problem of graph representation ensemble learning and provide a first of its kind framework to aggregate multiple graph embedding methods efficiently. We provide analysis of our framework and analyze -- theoretically and empirically -- the dependence between state-of-the-art embedding methods. We test our models on the node classification task on four real world graphs and show that proposed ensemble approaches can outperform the state-of-the-art methods by up to 8% on macro-F1. We further show that the approach is even more beneficial for underrepresented classes providing an improvement of up to 12%.
ArduCode: Predictive Framework for Automation Engineering
Sep 11, 2019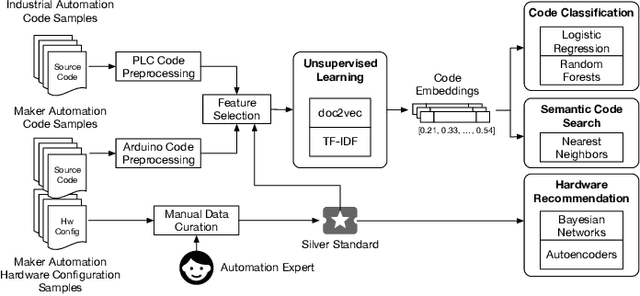
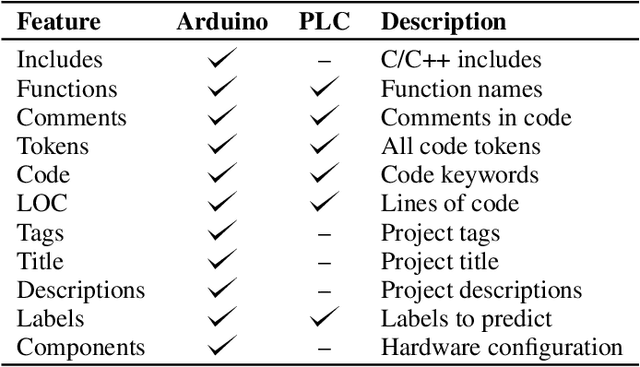
Automation engineering is the task of integrating, via software, various sensors, actuators, and controls for automating a real-world process. Today, automation engineering is supported by a suite of software tools including integrated development environments (IDE), hardware configurators, compilers, and runtimes. These tools focus on the automation code itself, but leave the automation engineer unassisted in their decision making. This can lead to increased time for software development because of imperfections in decision making leading to multiple iterations between software and hardware. To address this, this paper defines multiple challenges often faced in automation engineering and propose solutions using machine learning to assist engineers tackle such challenges. We show that machine learning can be leveraged to assist the automation engineer in classifying automation, finding similar code snippets, and reasoning about the hardware selection of sensors and actuators. We validate our architecture on two real datasets consisting of 2,927 Arduino projects, and 683 Programmable Logic Controller (PLC) projects. Our results show that paragraph embedding techniques can be utilized to classify automation using code snippets with precision close to human annotation, giving an F1-score of 72%. Further, we show that such embedding techniques can help us find similar code snippets with high accuracy. Finally, we use autoencoder models for hardware recommendation and achieve a p@3 of 0.79 and p@5 of 0.95.
Benchmarks for Graph Embedding Evaluation
Aug 26, 2019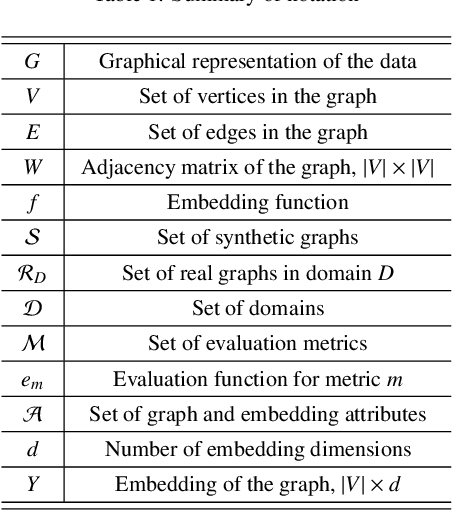
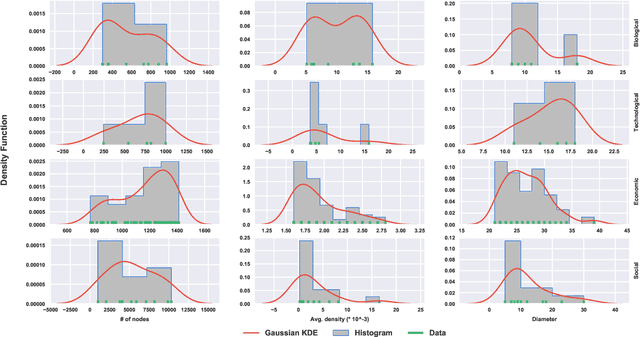
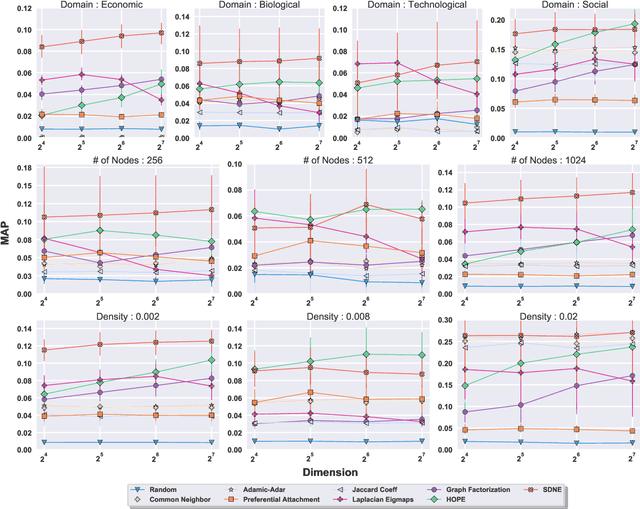
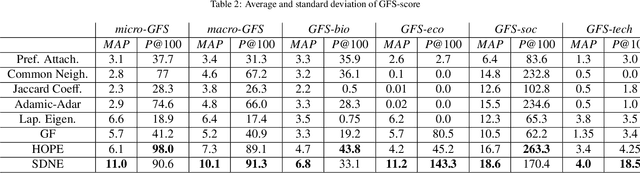
Graph embedding is the task of representing nodes of a graph in a low-dimensional space and its applications for graph tasks have gained significant traction in academia and industry. The primary difference among the many recently proposed graph embedding methods is the way they preserve the inherent properties of the graphs. However, in practice, comparing these methods is very challenging. The majority of methods report performance boosts on few selected real graphs. Therefore, it is difficult to generalize these performance improvements to other types of graphs. Given a graph, it is currently impossible to quantify the advantages of one approach over another. In this work, we introduce a principled framework to compare graph embedding methods. Our goal is threefold: (i) provide a unifying framework for comparing the performance of various graph embedding methods, (ii) establish a benchmark with real-world graphs that exhibit different structural properties, and (iii) provide users with a tool to identify the best graph embedding method for their data. This paper evaluates 4 of the most influential graph embedding methods and 4 traditional link prediction methods against a corpus of 100 real-world networks with varying properties. We organize the 100 networks in terms of their properties to get a better understanding of the embedding performance of these popular methods. We use the comparisons on our 100 benchmark graphs to define GFS-score, that can be applied to any embedding method to quantify its performance. We rank the state-of-the-art embedding approaches using the GFS-score and show that it can be used to understand and evaluate novel embedding approaches. We envision that the proposed framework (https://www.github.com/palash1992/GEM-Benchmark) will serve the community as a benchmarking platform to test and compare the performance of future graph embedding techniques.
Pykg2vec: A Python Library for Knowledge Graph Embedding
Jun 04, 2019
Pykg2vec is an open-source Python library for learning the representations of the entities and relations in knowledge graphs. Pykg2vec's flexible and modular software architecture currently implements 16 state-of-the-art knowledge graph embedding algorithms, and is designed to easily incorporate new algorithms. The goal of pykg2vec is to provide a practical and educational platform to accelerate research in knowledge graph representation learning. Pykg2vec is built on top of TensorFlow and Python's multiprocessing framework and provides modules for batch generation, Bayesian hyperparameter optimization, mean rank evaluation, embedding, and result visualization. Pykg2vec is released under the MIT License and is also available in the Python Package Index (PyPI). The source code of pykg2vec is available at https://github.com/Sujit-O/pykg2vec.
DynamicGEM: A Library for Dynamic Graph Embedding Methods
Nov 26, 2018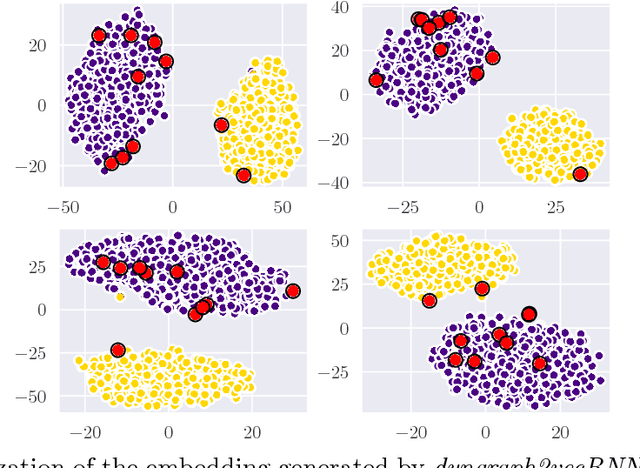
DynamicGEM is an open-source Python library for learning node representations of dynamic graphs. It consists of state-of-the-art algorithms for defining embeddings of nodes whose connections evolve over time. The library also contains the evaluation framework for four downstream tasks on the network: graph reconstruction, static and temporal link prediction, node classification, and temporal visualization. We have implemented various metrics to evaluate the state-of-the-art methods, and examples of evolving networks from various domains. We have easy-to-use functions to call and evaluate the methods and have extensive usage documentation. Furthermore, DynamicGEM provides a template to add new algorithms with ease to facilitate further research on the topic.
dyngraph2vec: Capturing Network Dynamics using Dynamic Graph Representation Learning
Sep 07, 2018
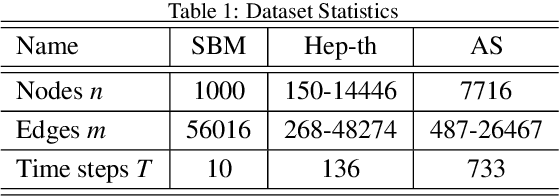
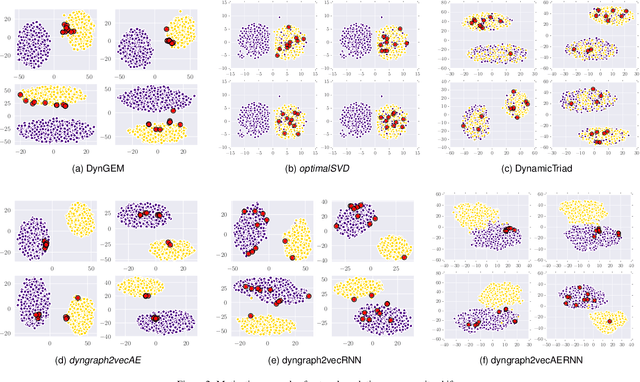
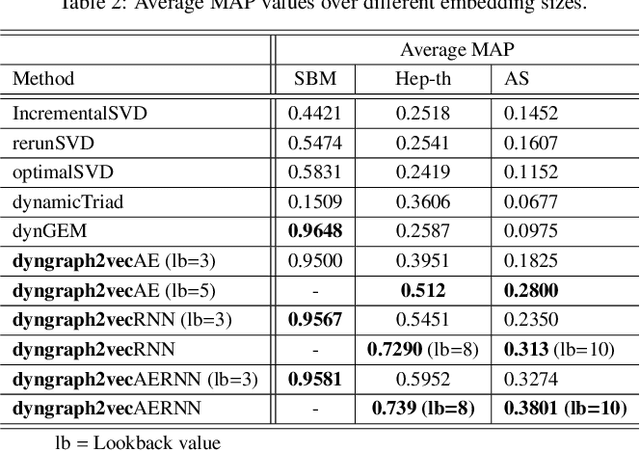
Learning graph representations is a fundamental task aimed at capturing various properties of graphs in vector space. The most recent methods learn such representations for static networks. However, real world networks evolve over time and have varying dynamics. Capturing such evolution is key to predicting the properties of unseen networks. To understand how the network dynamics affect the prediction performance, we propose an embedding approach which learns the structure of evolution in dynamic graphs and can predict unseen links with higher precision. Our model, dyngraph2vec, learns the temporal transitions in the network using a deep architecture composed of dense and recurrent layers. We motivate the need of capturing dynamics for prediction on a toy data set created using stochastic block models. We then demonstrate the efficacy of dyngraph2vec over existing state-of-the-art methods on two real world data sets. We observe that learning dynamics can improve the quality of embedding and yield better performance in link prediction.
Future Automation Engineering using Structural Graph Convolutional Neural Networks
Aug 24, 2018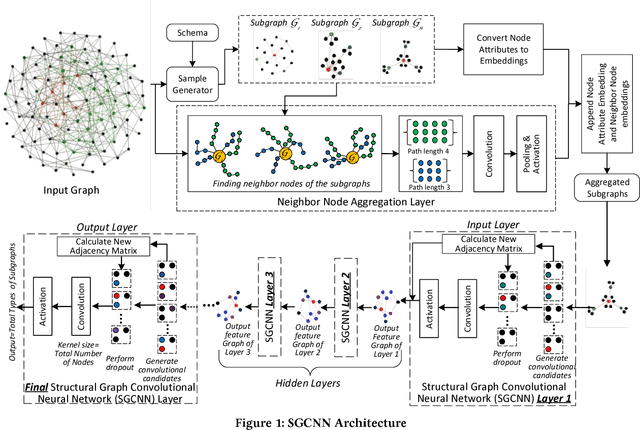
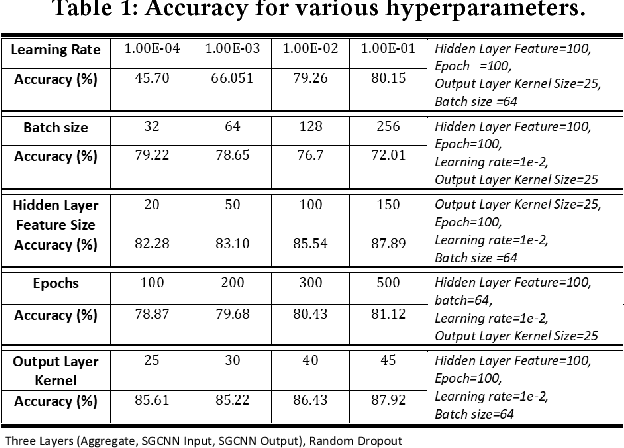
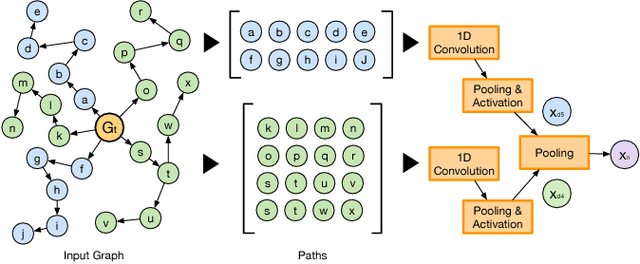
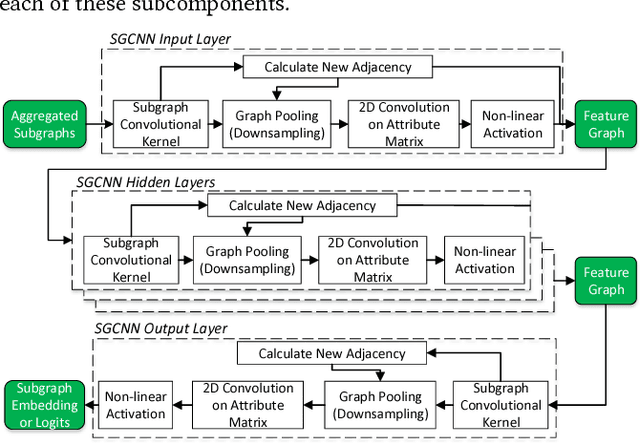
The digitalization of automation engineering generates large quantities of engineering data that is interlinked in knowledge graphs. Classifying and clustering subgraphs according to their functionality is useful to discover functionally equivalent engineering artifacts that exhibit different graph structures. This paper presents a new graph learning algorithm designed to classify engineering data artifacts -- represented in the form of graphs -- according to their structure and neighborhood features. Our Structural Graph Convolutional Neural Network (SGCNN) is capable of learning graphs and subgraphs with a novel graph invariant convolution kernel and downsampling/pooling algorithm. On a realistic engineering-related dataset, we show that SGCNN is capable of achieving ~91% classification accuracy.