 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetamorphic Testing with the Rashomon Set: Explanation Faithfulness in Machine Learning
Jun 04, 2026Multiple machine learning models can achieve near-equivalent predictive performance on the same task, yet provide divergent feature-based explanations. This is called the Rashomon effect of (explainable) machine learning, and it raises the question of which explanations, if any, are trustworthy. We propose a framework based on metamorphic testing that assesses explanation faithfulness without requiring ground-truth labels by exploring attributed feature importance from post-hoc explanation methods. Five metamorphic relations formalize expected consistency properties between model behavior and feature attributions. We apply this general framework to two tabular regression datasets and two post-hoc explainers (SHAP and LIME) to demonstrate the approach. The framework offers a practical, model-agnostic tool for selecting accurate models with reliable and trustworthy explanations.
Semi-supervised CAPP Transformer Learning via Pseudo-labeling
Feb 01, 2026High-level Computer-Aided Process Planning (CAPP) generates manufacturing process plans from part specifications. It suffers from limited dataset availability in industry, reducing model generalization. We propose a semi-supervised learning approach to improve transformer-based CAPP transformer models without manual labeling. An oracle, trained on available transformer behaviour data, filters correct predictions from unseen parts, which are then used for one-shot retraining. Experiments on small-scale datasets with simulated ground truth across the full data distribution show consistent accuracy gains over baselines, demonstrating the method's effectiveness in data-scarce manufacturing environments.
Context-Aware Autoencoders for Anomaly Detection in Maritime Surveillance
Jan 27, 2026The detection of anomalies is crucial to ensuring the safety and security of maritime vessel traffic surveillance. Although autoencoders are popular for anomaly detection, their effectiveness in identifying collective and contextual anomalies is limited, especially in the maritime domain, where anomalies depend on vessel-specific contexts derived from self-reported AIS messages. To address these limitations, we propose a novel solution: the context-aware autoencoder. By integrating context-specific thresholds, our method improves detection accuracy and reduces computational cost. We compare four context-aware autoencoder variants and a conventional autoencoder using a case study focused on fishing status anomalies in maritime surveillance. Results demonstrate the significant impact of context on reconstruction loss and anomaly detection. The context-aware autoencoder outperforms others in detecting anomalies in time series data. By incorporating context-specific thresholds and recognizing the importance of context in anomaly detection, our approach offers a promising solution to improve accuracy in maritime vessel traffic surveillance systems.
Explainable Scene Understanding with Qualitative Representations and Graph Neural Networks
Apr 17, 2025This paper investigates the integration of graph neural networks (GNNs) with Qualitative Explainable Graphs (QXGs) for scene understanding in automated driving. Scene understanding is the basis for any further reactive or proactive decision-making. Scene understanding and related reasoning is inherently an explanation task: why is another traffic participant doing something, what or who caused their actions? While previous work demonstrated QXGs' effectiveness using shallow machine learning models, these approaches were limited to analysing single relation chains between object pairs, disregarding the broader scene context. We propose a novel GNN architecture that processes entire graph structures to identify relevant objects in traffic scenes. We evaluate our method on the nuScenes dataset enriched with DriveLM's human-annotated relevance labels. Experimental results show that our GNN-based approach achieves superior performance compared to baseline methods. The model effectively handles the inherent class imbalance in relevant object identification tasks while considering the complete spatial-temporal relationships between all objects in the scene. Our work demonstrates the potential of combining qualitative representations with deep learning approaches for explainable scene understanding in autonomous driving systems.
Efficient Milling Quality Prediction with Explainable Machine Learning
Sep 16, 2024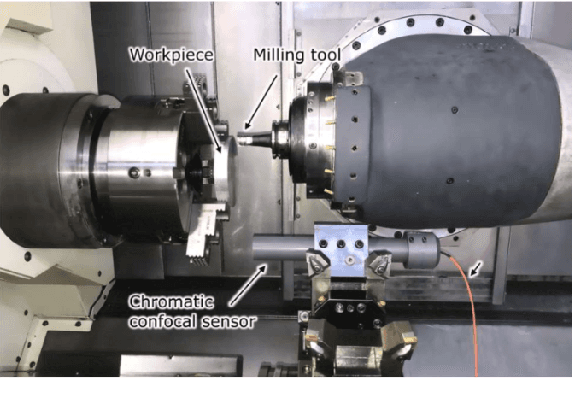
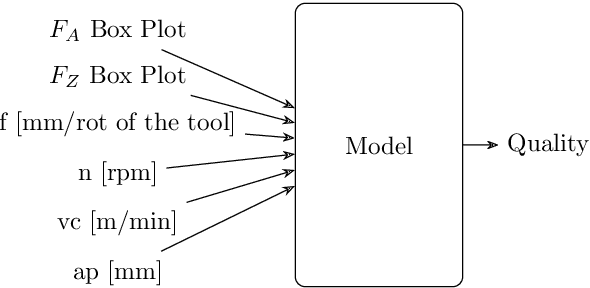
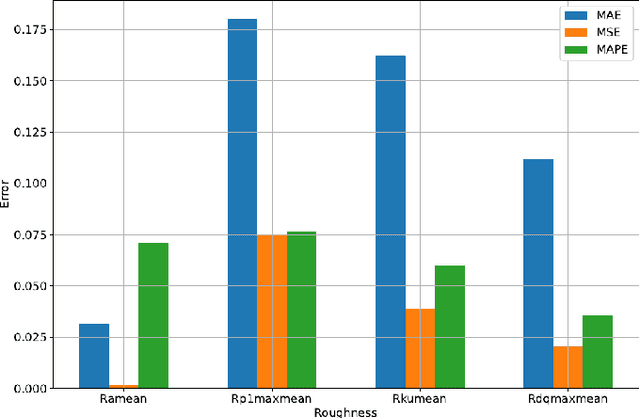
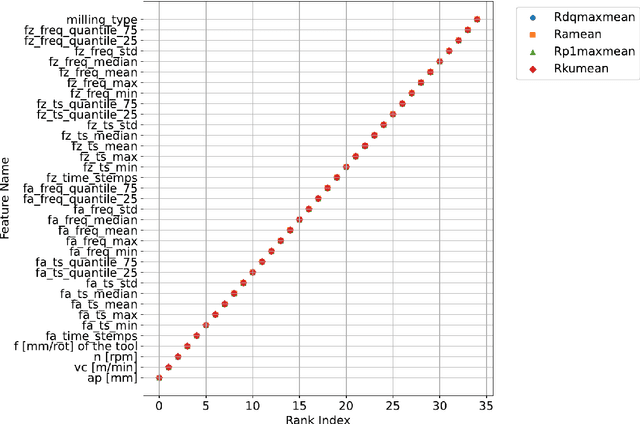
This paper presents an explainable machine learning (ML) approach for predicting surface roughness in milling. Utilizing a dataset from milling aluminum alloy 2017A, the study employs random forest regression models and feature importance techniques. The key contributions include developing ML models that accurately predict various roughness values and identifying redundant sensors, particularly those for measuring normal cutting force. Our experiments show that removing certain sensors can reduce costs without sacrificing predictive accuracy, highlighting the potential of explainable machine learning to improve cost-effectiveness in machining.
Evaluating Human Trajectory Prediction with Metamorphic Testing
Jul 26, 2024



The prediction of human trajectories is important for planning in autonomous systems that act in the real world, e.g. automated driving or mobile robots. Human trajectory prediction is a noisy process, and no prediction does precisely match any future trajectory. It is therefore approached as a stochastic problem, where the goal is to minimise the error between the true and the predicted trajectory. In this work, we explore the application of metamorphic testing for human trajectory prediction. Metamorphic testing is designed to handle unclear or missing test oracles. It is well-designed for human trajectory prediction, where there is no clear criterion of correct or incorrect human behaviour. Metamorphic relations rely on transformations over source test cases and exploit invariants. A setting well-designed for human trajectory prediction where there are many symmetries of expected human behaviour under variations of the input, e.g. mirroring and rescaling of the input data. We discuss how metamorphic testing can be applied to stochastic human trajectory prediction and introduce the Wasserstein Violation Criterion to statistically assess whether a follow-up test case violates a label-preserving metamorphic relation.
Enhancing Manufacturing Quality Prediction Models through the Integration of Explainability Methods
Mar 27, 2024


This research presents a method that utilizes explainability techniques to amplify the performance of machine learning (ML) models in forecasting the quality of milling processes, as demonstrated in this paper through a manufacturing use case. The methodology entails the initial training of ML models, followed by a fine-tuning phase where irrelevant features identified through explainability methods are eliminated. This procedural refinement results in performance enhancements, paving the way for potential reductions in manufacturing costs and a better understanding of the trained ML models. This study highlights the usefulness of explainability techniques in both explaining and optimizing predictive models in the manufacturing realm.
Towards Trustworthy Automated Driving through Qualitative Scene Understanding and Explanations
Mar 25, 2024



Understanding driving scenes and communicating automated vehicle decisions are key requirements for trustworthy automated driving. In this article, we introduce the Qualitative Explainable Graph (QXG), which is a unified symbolic and qualitative representation for scene understanding in urban mobility. The QXG enables interpreting an automated vehicle's environment using sensor data and machine learning models. It utilizes spatio-temporal graphs and qualitative constraints to extract scene semantics from raw sensor inputs, such as LiDAR and camera data, offering an interpretable scene model. A QXG can be incrementally constructed in real-time, making it a versatile tool for in-vehicle explanations across various sensor types. Our research showcases the potential of QXG, particularly in the context of automated driving, where it can rationalize decisions by linking the graph with observed actions. These explanations can serve diverse purposes, from informing passengers and alerting vulnerable road users to enabling post-hoc analysis of prior behaviors.
Detecting Intentional AIS Shutdown in Open Sea Maritime Surveillance Using Self-Supervised Deep Learning
Oct 24, 2023In maritime traffic surveillance, detecting illegal activities, such as illegal fishing or transshipment of illicit products is a crucial task of the coastal administration. In the open sea, one has to rely on Automatic Identification System (AIS) message transmitted by on-board transponders, which are captured by surveillance satellites. However, insincere vessels often intentionally shut down their AIS transponders to hide illegal activities. In the open sea, it is very challenging to differentiate intentional AIS shutdowns from missing reception due to protocol limitations, bad weather conditions or restricting satellite positions. This paper presents a novel approach for the detection of abnormal AIS missing reception based on self-supervised deep learning techniques and transformer models. Using historical data, the trained model predicts if a message should be received in the upcoming minute or not. Afterwards, the model reports on detected anomalies by comparing the prediction with what actually happens. Our method can process AIS messages in real-time, in particular, more than 500 Millions AIS messages per month, corresponding to the trajectories of more than 60 000 ships. The method is evaluated on 1-year of real-world data coming from four Norwegian surveillance satellites. Using related research results, we validated our method by rediscovering already detected intentional AIS shutdowns.
Acquiring Qualitative Explainable Graphs for Automated Driving Scene Interpretation
Aug 24, 2023


The future of automated driving (AD) is rooted in the development of robust, fair and explainable artificial intelligence methods. Upon request, automated vehicles must be able to explain their decisions to the driver and the car passengers, to the pedestrians and other vulnerable road users and potentially to external auditors in case of accidents. However, nowadays, most explainable methods still rely on quantitative analysis of the AD scene representations captured by multiple sensors. This paper proposes a novel representation of AD scenes, called Qualitative eXplainable Graph (QXG), dedicated to qualitative spatiotemporal reasoning of long-term scenes. The construction of this graph exploits the recent Qualitative Constraint Acquisition paradigm. Our experimental results on NuScenes, an open real-world multi-modal dataset, show that the qualitative eXplainable graph of an AD scene composed of 40 frames can be computed in real-time and light in space storage which makes it a potentially interesting tool for improved and more trustworthy perception and control processes in AD.