 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS3M: Semantic Segmentation Sparse Mapping for UAVs with RGB-D Camera
Jan 16, 2024



Unmanned Aerial Vehicles (UAVs) hold immense potential for critical applications, such as search and rescue operations, where accurate perception of indoor environments is paramount. However, the concurrent amalgamation of localization, 3D reconstruction, and semantic segmentation presents a notable hurdle, especially in the context of UAVs equipped with constrained power and computational resources. This paper presents a novel approach to address challenges in semantic information extraction and utilization within UAV operations. Our system integrates state-of-the-art visual SLAM to estimate a comprehensive 6-DoF pose and advanced object segmentation methods at the back end. To improve the computational and storage efficiency of the framework, we adopt a streamlined voxel-based 3D map representation - OctoMap to build a working system. Furthermore, the fusion algorithm is incorporated to obtain the semantic information of each frame from the front-end SLAM task, and the corresponding point. By leveraging semantic information, our framework enhances the UAV's ability to perceive and navigate through indoor spaces, addressing challenges in pose estimation accuracy and uncertainty reduction. Through Gazebo simulations, we validate the efficacy of our proposed system and successfully embed our approach into a Jetson Xavier AGX unit for real-world applications.
Object-Oriented Semantic Mapping for Reliable UAVs Navigation
Jan 16, 2024To autonomously navigate in real-world environments, special in search and rescue operations, Unmanned Aerial Vehicles (UAVs) necessitate comprehensive maps to ensure safety. However, the prevalent metric map often lacks semantic information crucial for holistic scene comprehension. In this paper, we proposed a system to construct a probabilistic metric map enriched with object information extracted from the environment from RGB-D images. Our approach combines a state-of-the-art YOLOv8-based object detection framework at the front end and a 2D SLAM method - CartoGrapher at the back end. To effectively track and position semantic object classes extracted from the front-end interface, we employ the innovative BoT-SORT methodology. A novel association method is introduced to extract the position of objects and then project it with the metric map. Unlike previous research, our approach takes into reliable navigating in the environment with various hollow bottom objects. The output of our system is a probabilistic map, which significantly enhances the map's representation by incorporating object-specific attributes, encompassing class distinctions, accurate positioning, and object heights. A number of experiments have been conducted to evaluate our proposed approach. The results show that the robot can effectively produce augmented semantic maps containing several objects (notably chairs and desks). Furthermore, our system is evaluated within an embedded computer - Jetson Xavier AGX unit to demonstrate the use case in real-world applications.
Abdominal Multi-Organ Segmentation Based on Feature Pyramid Network and Spatial Recurrent Neural Network
Aug 29, 2023

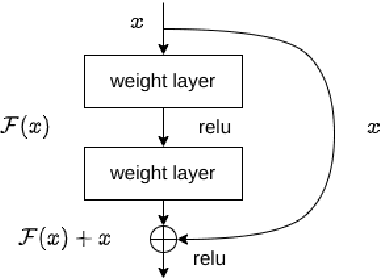
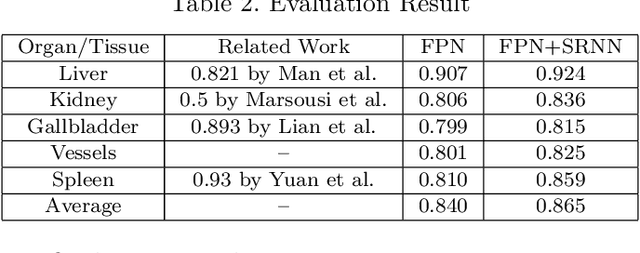
As recent advances in AI are causing the decline of conventional diagnostic methods, the realization of end-to-end diagnosis is fast approaching. Ultrasound image segmentation is an important step in the diagnostic process. An accurate and robust segmentation model accelerates the process and reduces the burden of sonographers. In contrast to previous research, we take two inherent features of ultrasound images into consideration: (1) different organs and tissues vary in spatial sizes, (2) the anatomical structures inside human body form a relatively constant spatial relationship. Based on those two ideas, we propose a new image segmentation model combining Feature Pyramid Network (FPN) and Spatial Recurrent Neural Network (SRNN). We discuss why we use FPN to extract anatomical structures of different scales and how SRNN is implemented to extract the spatial context features in abdominal ultrasound images.
Does Deep Learning REALLY Outperform Non-deep Machine Learning for Clinical Prediction on Physiological Time Series?
Nov 11, 2022Machine learning has been widely used in healthcare applications to approximate complex models, for clinical diagnosis, prognosis, and treatment. As deep learning has the outstanding ability to extract information from time series, its true capabilities on sparse, irregularly sampled, multivariate, and imbalanced physiological data are not yet fully explored. In this paper, we systematically examine the performance of machine learning models for the clinical prediction task based on the EHR, especially physiological time series. We choose Physionet 2019 challenge public dataset to predict Sepsis outcomes in ICU units. Ten baseline machine learning models are compared, including 3 deep learning methods and 7 non-deep learning methods, commonly used in the clinical prediction domain. Nine evaluation metrics with specific clinical implications are used to assess the performance of models. Besides, we sub-sample training dataset sizes and use learning curve fit to investigate the impact of the training dataset size on the performance of the machine learning models. We also propose the general pre-processing method for the physiology time-series data and use Dice Loss to deal with the dataset imbalanced problem. The results show that deep learning indeed outperforms non-deep learning, but with certain conditions: firstly, evaluating with some particular evaluation metrics (AUROC, AUPRC, Sensitivity, and FNR), but not others; secondly, the training dataset size is large enough (with an estimation of a magnitude of thousands).