 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCARLS: Cross-platform Asynchronous Representation Learning System
May 26, 2021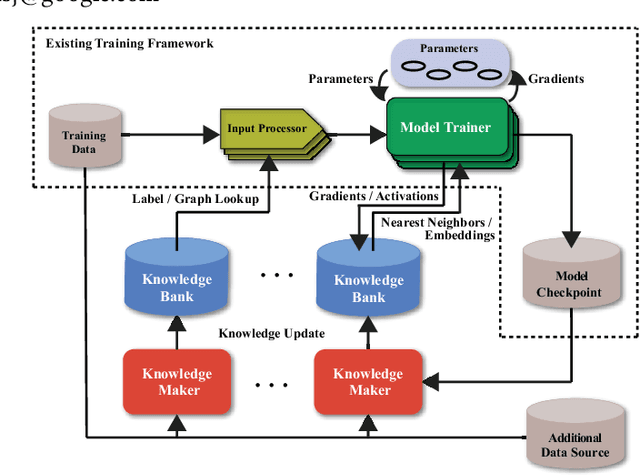
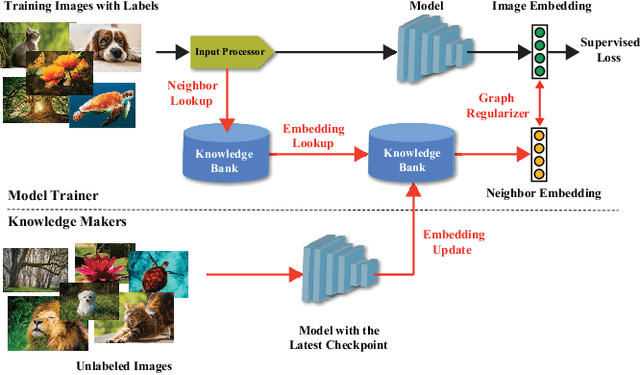
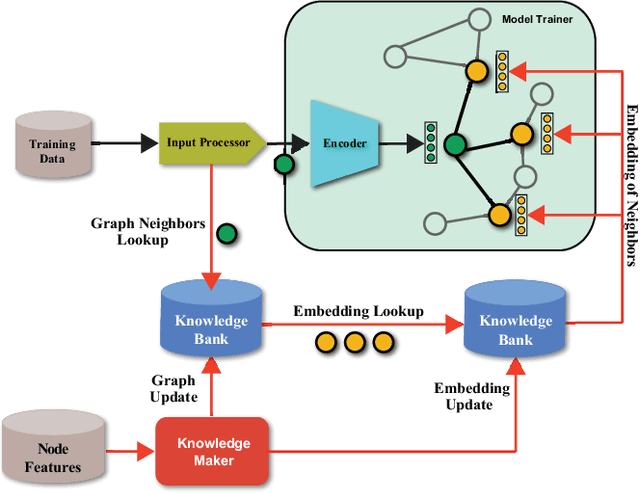
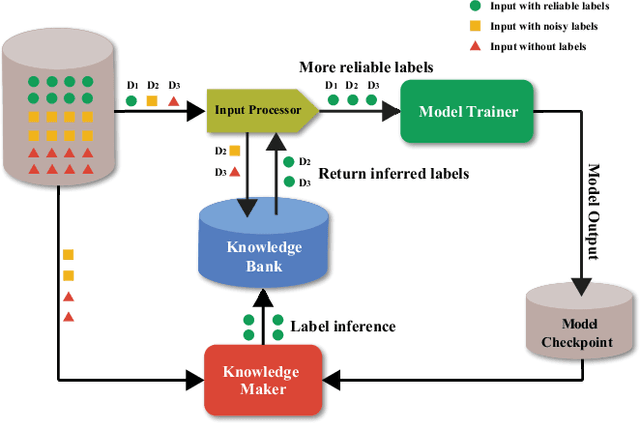
In this work, we propose CARLS, a novel framework for augmenting the capacity of existing deep learning frameworks by enabling multiple components -- model trainers, knowledge makers and knowledge banks -- to concertedly work together in an asynchronous fashion across hardware platforms. The proposed CARLS is particularly suitable for learning paradigms where model training benefits from additional knowledge inferred or discovered during training, such as node embeddings for graph neural networks or reliable pseudo labels from model predictions. We also describe three learning paradigms -- semi-supervised learning, curriculum learning and multimodal learning -- as examples that can be scaled up efficiently by CARLS. One version of CARLS has been open-sourced and available for download at: https://github.com/tensorflow/neural-structured-learning/tree/master/research/carls
Graph Autoencoders with Deconvolutional Networks
Dec 22, 2020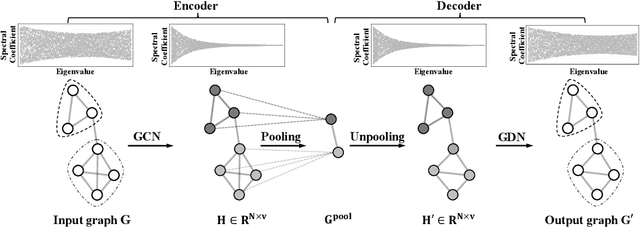
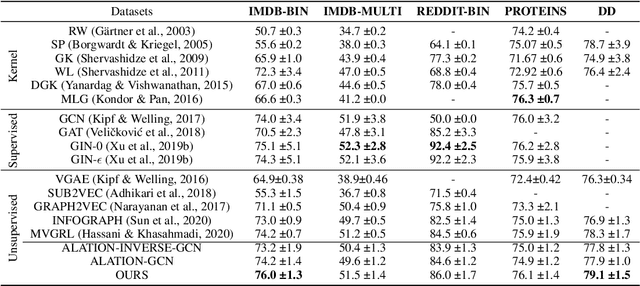
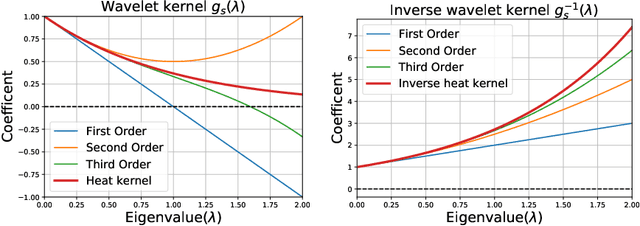
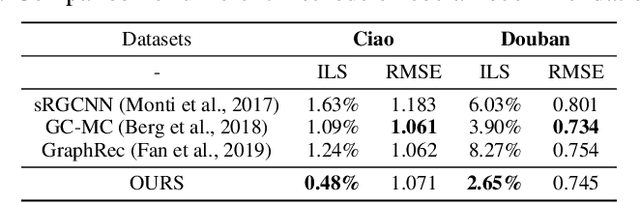
Recent studies have indicated that Graph Convolutional Networks (GCNs) act as a \emph{low pass} filter in spectral domain and encode smoothed node representations. In this paper, we consider their opposite, namely Graph Deconvolutional Networks (GDNs) that reconstruct graph signals from smoothed node representations. We motivate the design of Graph Deconvolutional Networks via a combination of inverse filters in spectral domain and de-noising layers in wavelet domain, as the inverse operation results in a \emph{high pass} filter and may amplify the noise. Based on the proposed GDN, we further propose a graph autoencoder framework that first encodes smoothed graph representations with GCN and then decodes accurate graph signals with GDN. We demonstrate the effectiveness of the proposed method on several tasks including unsupervised graph-level representation , social recommendation and graph generation