 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Dynamic Pricing for Electric Vehicle Charging Stations with Reservations
Oct 07, 2024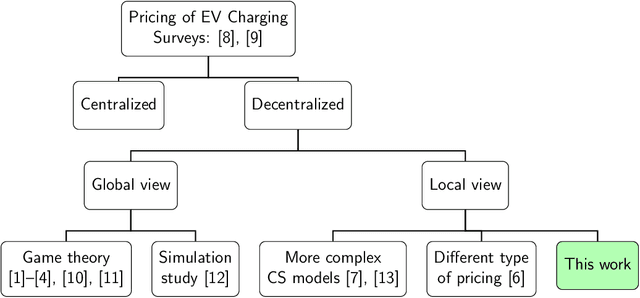
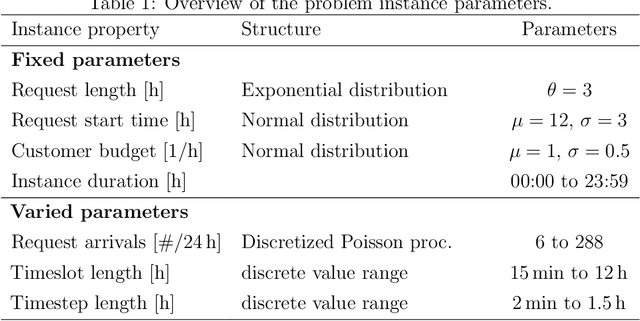
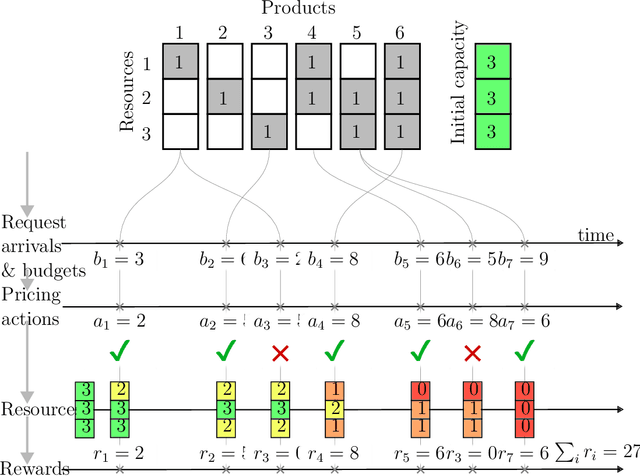
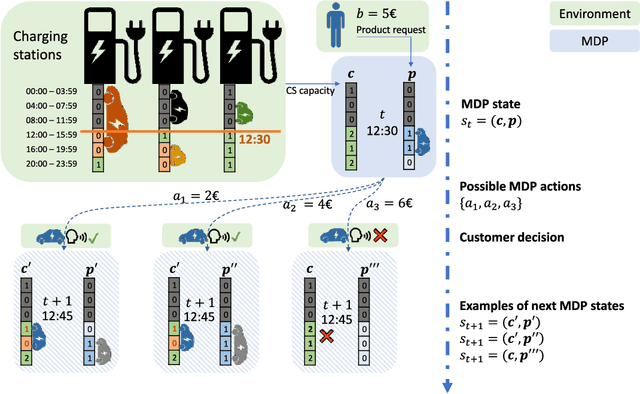
The transition to electric vehicles (EVs), coupled with the rise of renewable energy sources, will significantly impact the electric grid. Unlike conventional fuel sources, electricity for EVs is constrained by grid capacity, price fluctuations, and long EV charging times, requiring new pricing solutions to manage demand and supply. This paper proposes a model for online dynamic pricing of reserved EV charging services, including reservation, parking, and charging as a bundled service priced as a whole. Our approach focuses on the individual charging station operator, employing a stochastic demand model and online dynamic pricing based on expected demand. The proposed model uses a Markov Decision Process (MDP) formulation to optimize sequential pricing decisions for charging session requests. A key contribution is the novel definition and quantification of discretization error introduced by the discretization of the Poisson process for use in the MDP. The model's viability is demonstrated with a heuristic solution method based on Monte-Carlo tree search, offering a viable path for real-world application.
Optimize Planning Heuristics to Rank, not to Estimate Cost-to-Goal
Oct 30, 2023In imitation learning for planning, parameters of heuristic functions are optimized against a set of solved problem instances. This work revisits the necessary and sufficient conditions of strictly optimally efficient heuristics for forward search algorithms, mainly A* and greedy best-first search, which expand only states on the returned optimal path. It then proposes a family of loss functions based on ranking tailored for a given variant of the forward search algorithm. Furthermore, from a learning theory point of view, it discusses why optimizing cost-to-goal \hstar\ is unnecessarily difficult. The experimental comparison on a diverse set of problems unequivocally supports the derived theory.
Cooperative Multi-Agent Planning: A Survey
Nov 24, 2017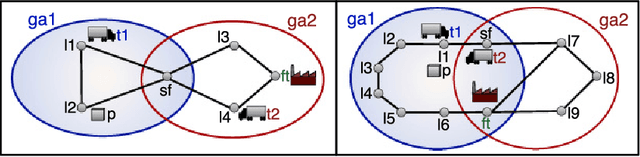
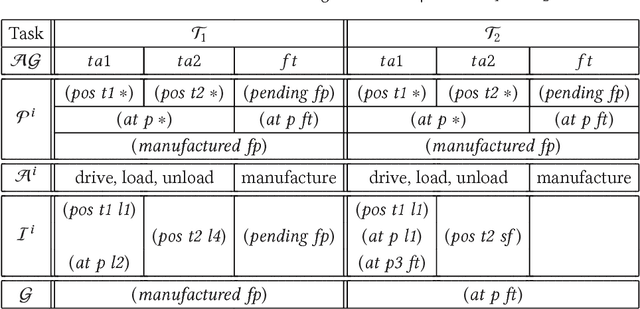
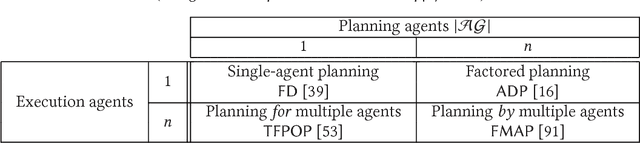
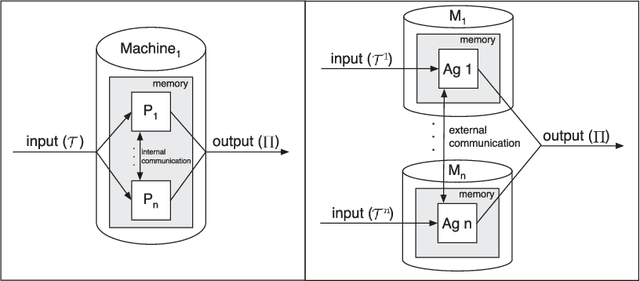
Cooperative multi-agent planning (MAP) is a relatively recent research field that combines technologies, algorithms and techniques developed by the Artificial Intelligence Planning and Multi-Agent Systems communities. While planning has been generally treated as a single-agent task, MAP generalizes this concept by considering multiple intelligent agents that work cooperatively to develop a course of action that satisfies the goals of the group. This paper reviews the most relevant approaches to MAP, putting the focus on the solvers that took part in the 2015 Competition of Distributed and Multi-Agent Planning, and classifies them according to their key features and relative performance.
* 34 pages, 4 figures, 4 tables
Decentralized Multi-agent Plan Repair in Dynamic Environments
Feb 13, 2012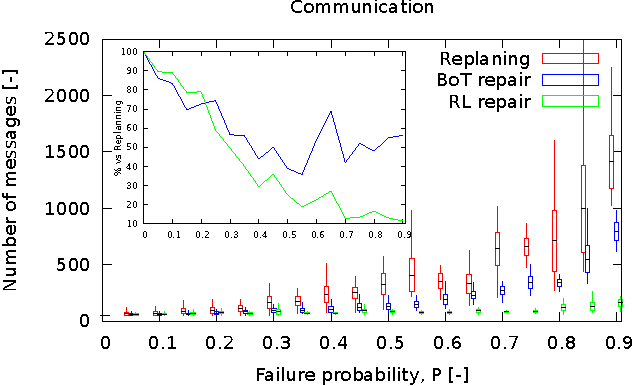
Achieving joint objectives by teams of cooperative planning agents requires significant coordination and communication efforts. For a single-agent system facing a plan failure in a dynamic environment, arguably, attempts to repair the failed plan in general do not straightforwardly bring any benefit in terms of time complexity. However, in multi-agent settings the communication complexity might be of a much higher importance, possibly a high communication overhead might be even prohibitive in certain domains. We hypothesize that in decentralized systems, where coordination is enforced to achieve joint objectives, attempts to repair failed multi-agent plans should lead to lower communication overhead than replanning from scratch. The contribution of the presented paper is threefold. Firstly, we formally introduce the multi-agent plan repair problem and formally present the core hypothesis underlying our work. Secondly, we propose three algorithms for multi-agent plan repair reducing the problem to specialized instances of the multi-agent planning problem. Finally, we present results of experimental validation confirming the core hypothesis of the paper.