 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Dynamic Pricing for Electric Vehicle Charging Stations with Reservations
Oct 07, 2024
The transition to electric vehicles (EVs), coupled with the rise of renewable energy sources, will significantly impact the electric grid. Unlike conventional fuel sources, electricity for EVs is constrained by grid capacity, price fluctuations, and long EV charging times, requiring new pricing solutions to manage demand and supply. This paper proposes a model for online dynamic pricing of reserved EV charging services, including reservation, parking, and charging as a bundled service priced as a whole. Our approach focuses on the individual charging station operator, employing a stochastic demand model and online dynamic pricing based on expected demand. The proposed model uses a Markov Decision Process (MDP) formulation to optimize sequential pricing decisions for charging session requests. A key contribution is the novel definition and quantification of discretization error introduced by the discretization of the Poisson process for use in the MDP. The model's viability is demonstrated with a heuristic solution method based on Monte-Carlo tree search, offering a viable path for real-world application.
Complete Decentralized Method for On-Line Multi-Robot Trajectory Planning in Valid Infrastructures
Jan 30, 2015

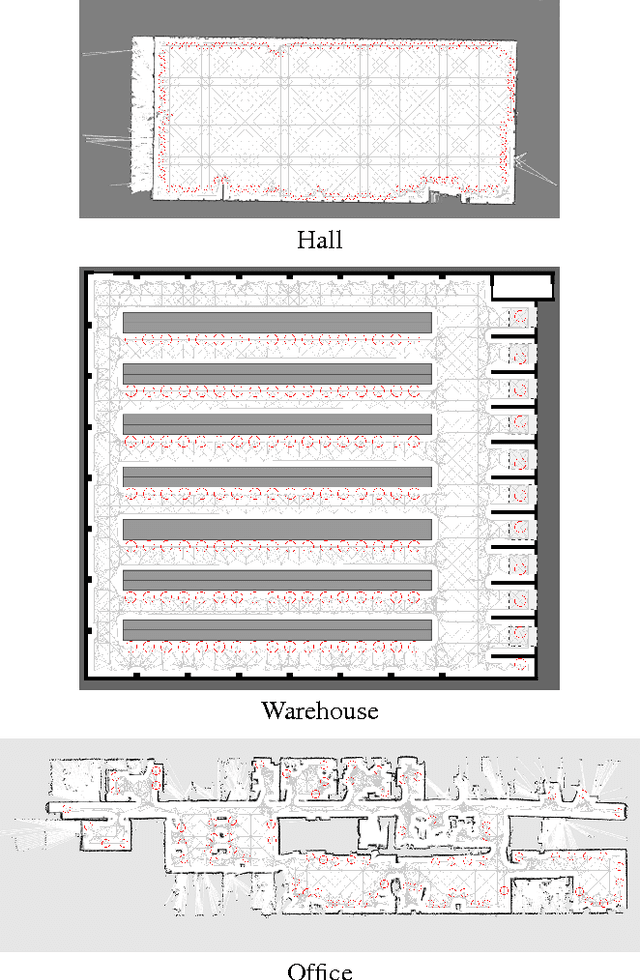
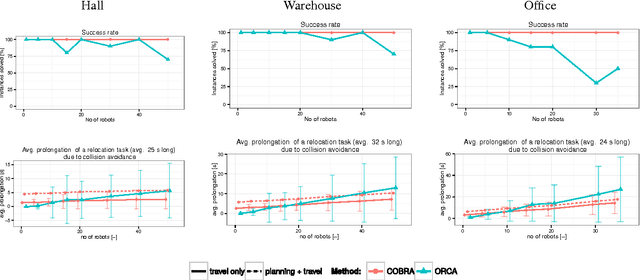
We consider a system consisting of multiple mobile robots in which the user can at any time issue relocation tasks ordering one of the robots to move from its current location to a given destination location. In this paper, we deal with the problem of finding a trajectory for each such relocation task that avoids collisions with other robots. The chosen robot plans its trajectory so as to avoid collision with other robots executing tasks that were issued earlier. We prove that if all possible destinations of the relocation tasks satisfy so-called valid infrastructure property, then this mechanism is guaranteed to always succeed and provide a trajectory for the robot that reaches the destination without colliding with any other robot. The time-complexity of the approach on a fixed space-time discretization is only quadratic in the number of robots. We demonstrate the applicability of the presented method on several real-world maps and compare its performance against a popular reactive approach that attempts to solve the collisions locally. Besides being dead-lock free, the presented approach generates trajectories that are significantly faster (up to 48% improvement) than the trajectories resulting from local collision avoidance.
Finding Coordinated Paths for Multiple Holonomic Agents in 2-d Polygonal Environment
Feb 14, 2014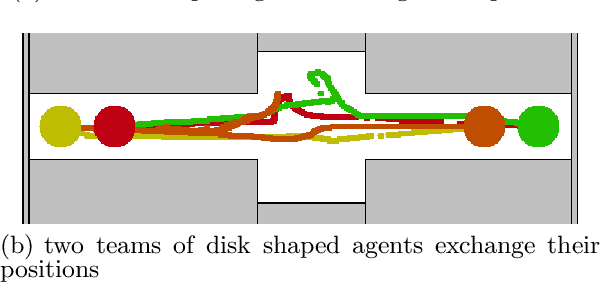


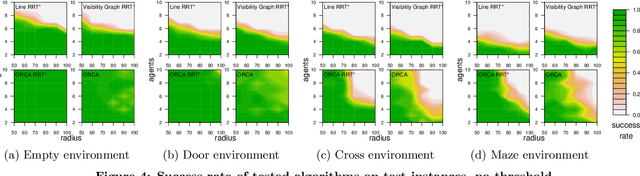
Avoiding collisions is one of the vital tasks for systems of autonomous mobile agents. We focus on the problem of finding continuous coordinated paths for multiple mobile disc agents in a 2-d environment with polygonal obstacles. The problem is PSPACE-hard, with the state space growing exponentially in the number of agents. Therefore, the state of the art methods include mainly reactive techniques and sampling-based iterative algorithms. We compare the performance of a widely-used reactive method ORCA with three variants of a popular planning algorithm RRT* applied to multi-agent path planning and find that an algorithm combining reactive collision avoidance and RRT* planning, which we call ORCA-RRT* can be used to solve instances that are out of the reach of either of the techniques. We experimentally show that: 1) the reactive part of the algorithm can efficiently solve many multi-agent path finding problems involving large number of agents, for which RRT* algorithm is often unable to find a solution in limited time and 2) the planning component of the algorithm is able to solve many instances containing local minima, where reactive techniques typically fail.
Multi-agent RRT*: Sampling-based Cooperative Pathfinding (Extended Abstract)
Feb 12, 2013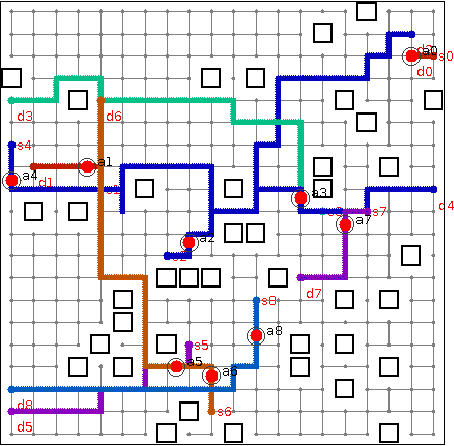
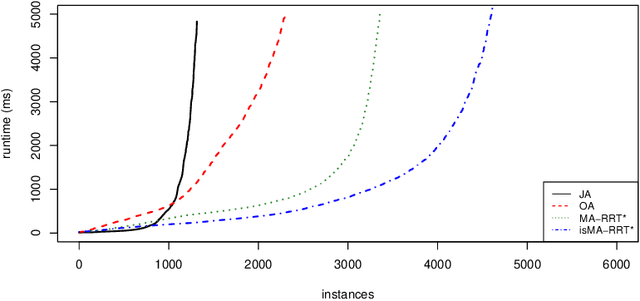
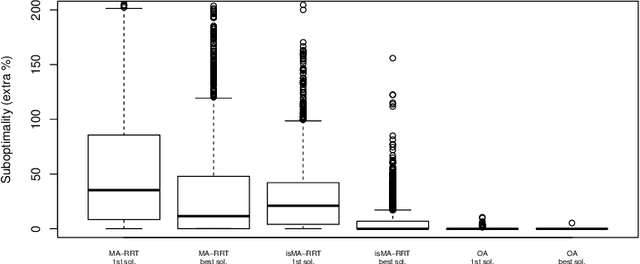

Cooperative pathfinding is a problem of finding a set of non-conflicting trajectories for a number of mobile agents. Its applications include planning for teams of mobile robots, such as autonomous aircrafts, cars, or underwater vehicles. The state-of-the-art algorithms for cooperative pathfinding typically rely on some heuristic forward-search pathfinding technique, where A* is often the algorithm of choice. Here, we propose MA-RRT*, a novel algorithm for multi-agent path planning that builds upon a recently proposed asymptotically-optimal sampling-based algorithm for finding single-agent shortest path called RRT*. We experimentally evaluate the performance of the algorithm and show that the sampling-based approach offers better scalability than the classical forward-search approach in relatively large, but sparse environments, which are typical in real-world applications such as multi-aircraft collision avoidance.
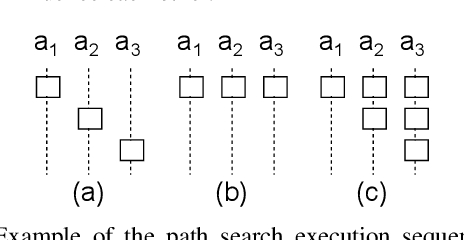
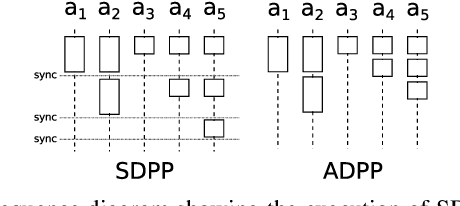
Asynchronous Decentralized Algorithm for Space-Time Cooperative Pathfinding
Oct 25, 2012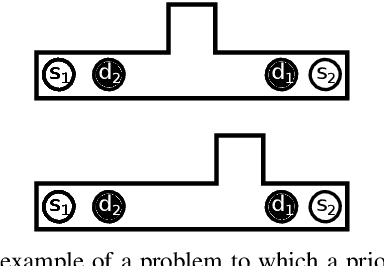

Cooperative pathfinding is a multi-agent path planning problem where a group of vehicles searches for a corresponding set of non-conflicting space-time trajectories. Many of the practical methods for centralized solving of cooperative pathfinding problems are based on the prioritized planning strategy. However, in some domains (e.g., multi-robot teams of unmanned aerial vehicles, autonomous underwater vehicles, or unmanned ground vehicles) a decentralized approach may be more desirable than a centralized one due to communication limitations imposed by the domain and/or privacy concerns. In this paper we present an asynchronous decentralized variant of prioritized planning ADPP and its interruptible version IADPP. The algorithm exploits the inherent parallelism of distributed systems and allows for a speed up of the computation process. Unlike the synchronized planning approaches, the algorithm allows an agent to react to updates about other agents' paths immediately and invoke its local spatio-temporal path planner to find the best trajectory, as response to the other agents' choices. We provide a proof of correctness of the algorithms and experimentally evaluate them on synthetic domains.