 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReceding Horizon Re-ordering of Multi-Agent Execution Schedules
Dec 07, 2023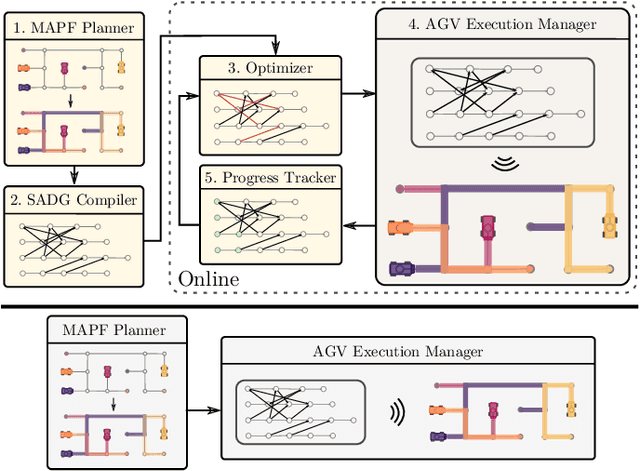
The trajectory planning for a fleet of Automated Guided Vehicles (AGVs) on a roadmap is commonly referred to as the Multi-Agent Path Finding (MAPF) problem, the solution to which dictates each AGV's spatial and temporal location until it reaches it's goal without collision. When executing MAPF plans in dynamic workspaces, AGVs can be frequently delayed, e.g., due to encounters with humans or third-party vehicles. If the remainder of the AGVs keeps following their individual plans, synchrony of the fleet is lost and some AGVs may pass through roadmap intersections in a different order than originally planned. Although this could reduce the cumulative route completion time of the AGVs, generally, a change in the original ordering can cause conflicts such as deadlocks. In practice, synchrony is therefore often enforced by using a MAPF execution policy employing, e.g., an Action Dependency Graph (ADG) to maintain ordering. To safely re-order without introducing deadlocks, we present the concept of the Switchable Action Dependency Graph (SADG). Using the SADG, we formulate a comparatively low-dimensional Mixed-Integer Linear Program (MILP) that repeatedly re-orders AGVs in a recursively feasible manner, thus maintaining deadlock-free guarantees, while dynamically minimizing the cumulative route completion time of all AGVs. Various simulations validate the efficiency of our approach when compared to the original ADG method as well as robust MAPF solution approaches.
An Industrial Perspective on Multi-Agent Decision Making for Interoperable Robot Navigation following the VDA5050 Standard
Nov 24, 2023

This paper provides a perspective on the literature and current challenges in Multi-Agent Systems for interoperable robot navigation in industry. The focus is on the multi-agent decision stack for Autonomous Mobile Robots operating in mixed environments with humans, manually driven vehicles, and legacy Automated Guided Vehicles. We provide typical characteristics of such Multi-Agent Systems observed today and how these are expected to change on the short term due to the new standard VDA5050 and the interoperability framework OpenRMF. We present recent changes in fleet management standards and the role of open middleware frameworks like ROS2 reaching industrial-grade quality. Approaches to increase the robustness and performance of multi-robot navigation systems for transportation are discussed, and research opportunities are derived.
Complete Decentralized Method for On-Line Multi-Robot Trajectory Planning in Valid Infrastructures
Jan 30, 2015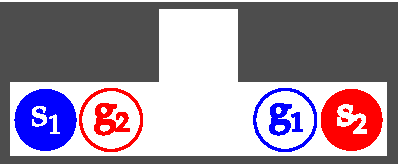

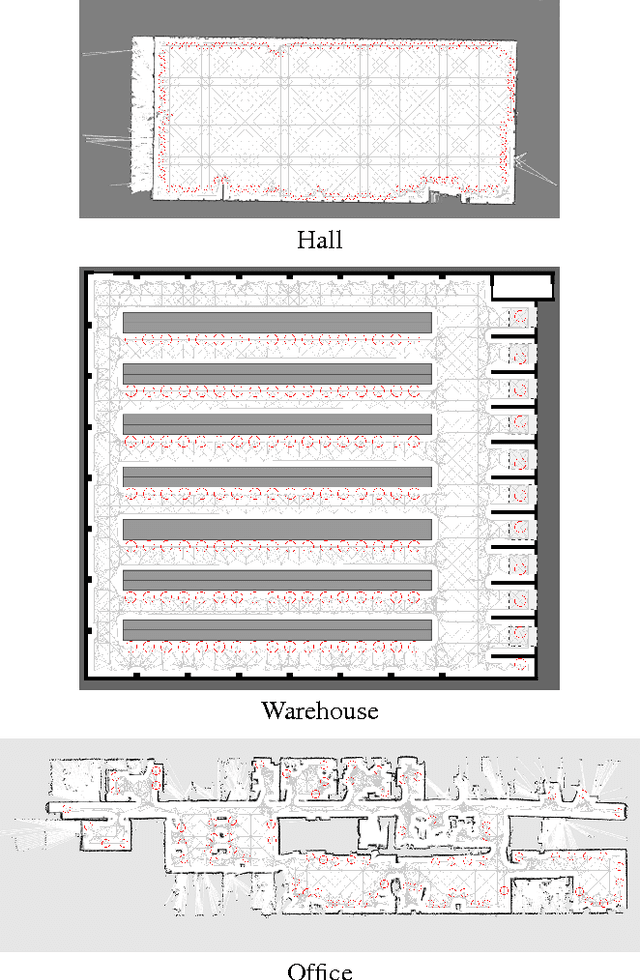
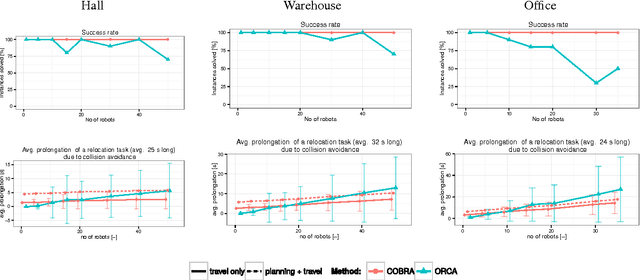
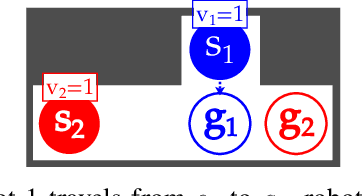
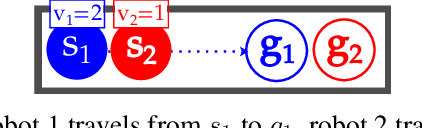
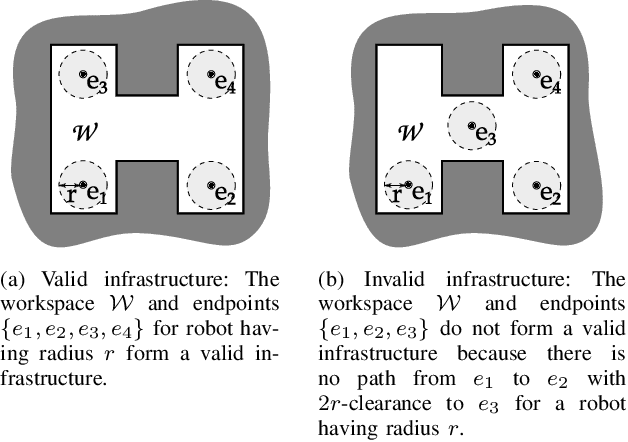
We consider a system consisting of multiple mobile robots in which the user can at any time issue relocation tasks ordering one of the robots to move from its current location to a given destination location. In this paper, we deal with the problem of finding a trajectory for each such relocation task that avoids collisions with other robots. The chosen robot plans its trajectory so as to avoid collision with other robots executing tasks that were issued earlier. We prove that if all possible destinations of the relocation tasks satisfy so-called valid infrastructure property, then this mechanism is guaranteed to always succeed and provide a trajectory for the robot that reaches the destination without colliding with any other robot. The time-complexity of the approach on a fixed space-time discretization is only quadratic in the number of robots. We demonstrate the applicability of the presented method on several real-world maps and compare its performance against a popular reactive approach that attempts to solve the collisions locally. Besides being dead-lock free, the presented approach generates trajectories that are significantly faster (up to 48% improvement) than the trajectories resulting from local collision avoidance.
Finding Near-optimal Solutions in Multi-robot Path Planning
Oct 20, 2014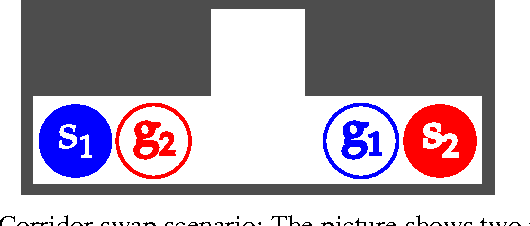
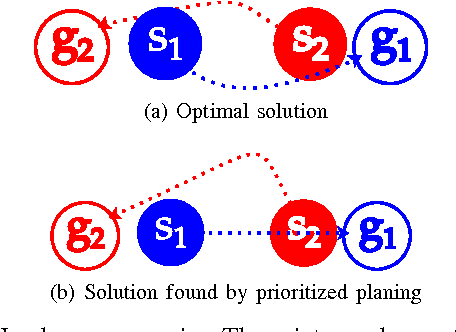
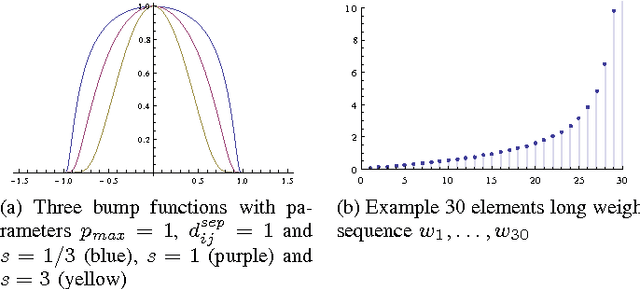
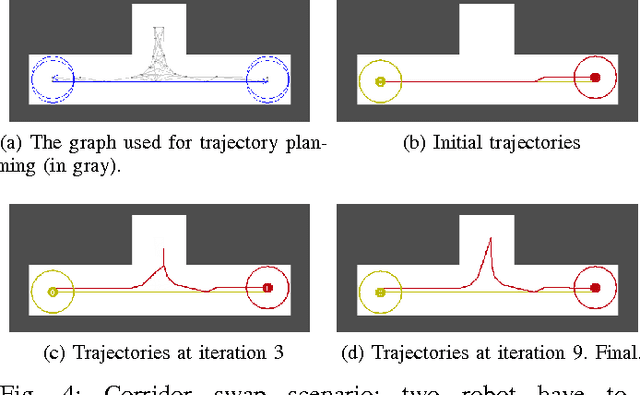
We deal with the problem of planning collision-free trajectories for robots operating in a shared space. Given the start and destination position for each of the robots, the task is to find trajectories for all robots that reach their destinations with minimum total cost such that the robots will not collide when following the found trajectories. Our approach starts from individually optimal trajectory for each robot, which are then penalized for being in collision with other robots. The penalty is gradually increased and the individual trajectories are iteratively replanned to account for the increased penalty until a collision-free solution is found. Using extensive experimental evaluation, we find that such a penalty method constructs trajectories with near-optimal cost on the instances where the optimum is known and otherwise with 4-10 % lower cost than the trajectories generated by prioritized planning and up to 40 % cheaper than trajectories generated by local collision avoidance techniques, such as ORCA.
Prioritized Planning Algorithms for Trajectory Coordination of Multiple Mobile Robots
Sep 08, 2014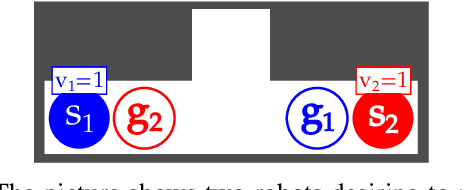
An important capability of autonomous multi-robot systems is to prevent collision among the individual robots. One approach to this problem is to plan conflict-free trajectories and let each of the robots follow its pre-planned trajectory. A widely used practical method for multi-robot trajectory planning is prioritized planning, which has been shown to be effective in practice, but is in general incomplete. Formal analysis of instances that are provably solvable by prioritized planning is still missing. Moreover, prioritized planning is a centralized algorithm, which may be in many situations undesirable. In this paper we a) propose a revised version of prioritized planning and characterize the class of instances that are provably solvable by the algorithm and b) propose an asynchronous decentralized variant of prioritized planning, which maintains the desirable properties of the centralized version and in the same time exploits the distributed computational power of the individual robots, which in most situations allows to find the joint trajectories faster. The experimental evaluation performed on real-world indoor maps shows that a) the revised version of prioritized planning reliably solves a wide class of instances on which both classical prioritized planning and popular reactive technique ORCA fail and b) the asynchronous decentralized algorithm provides solution faster than the previously proposed synchronized decentralized algorithm.