 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Robots Do Matters More Than What They Look Like: Task Context Shapes Trust in Educational HRI
Jun 12, 2026Socially assistive robots (SARs) are increasingly deployed in educational and information-sharing contexts, supported by advances in large language models that enable fluent real-time interaction. Despite the growing diversity of robot embodiments, it remains unclear whether a single robot appearance is appropriate across different interaction tasks or whether trust depends primarily on contextual factors. In this study, we examine how robot appearance and task type jointly influence trust in robots. Using a within-subjects video-based experiment (N = 81), participants evaluated three robots with distinct appearances while performing three educationally relevant tasks: teaching, procedural instruction, and personal-information discussion. Results from repeated-measures analyses show a strong main effect of task on trust, with participants reporting the highest trust during instructional guidance, moderate trust during teaching activities, and significantly lower trust when robots requested personal information. In contrast, robot appearance showed no significant main effect, and the interaction between appearance and task was marginal. These findings suggest that trust in human-robot interaction is shaped more strongly by task context than by physical embodiment alone. By focusing on future educators as end users, this work contributes empirical evidence toward task-aware robot deployment in educational environments and highlights the importance of aligning robot roles and behaviors with interaction goals rather than relying solely on anthropomorphic design.
Humor Style Drives Laughter, Topic Shapes Acceptability: Evaluating Bilingual Personal and Political Robot-Delivered AI Jokes
Jun 11, 2026Humor plays a central role in human social relationships, and recent advances in computational humor create new opportunities for integrating humor into human-robot interaction (HRI). While large language models (LLMs) can generate diverse forms of humor, it remains unclear how humor style, joke content, and language preference shape perceptions of robot-delivered humor in group settings. In this exploratory study, we employed a mixed factorial design in which participants evaluated AI-generated jokes delivered by a robot in a university classroom. We examined the effects of humor type (Affiliative, Self-Enhancing, Aggressive, Self-Defeating) and joke content (person-related vs. political) on perceived funniness and appropriateness, as well as preferred language. Results show that humor type significantly influences funniness, with Aggressive and Affiliative humor rated higher, while joke content primarily affects appropriateness, with person-related jokes preferred over political ones. Language preference was shaped by both joke content and participants' self-reported fluency and humor practices.
An Interactive Augmented Reality Interface for Personalized Proxemics Modeling
Aug 06, 2024



Understanding and respecting personal space preferences is essential for socially assistive robots designed for older adult users. This work introduces and evaluates a novel personalized context-aware method for modeling users' proxemics preferences during human-robot interactions. Using an interactive augmented reality interface, we collected a set of user-preferred distances from the robot and employed an active transfer learning approach to fine-tune a specialized deep learning model. We evaluated this approach through two user studies: 1) a convenience population study (N = 24) to validate the efficacy of the active transfer learning approach; and 2) a user study involving older adults (N = 15) to assess the system's usability. We compared the data collected with the augmented reality interface and with the physical robot to examine the relationship between proxemics preferences for a virtual robot versus a physically embodied robot. We found that fine-tuning significantly improved model performance: on average, the error in testing decreased by 26.97% after fine-tuning. The system was well-received by older adult participants, who provided valuable feedback and suggestions for future work.
Socially Assistive Robot in Sexual Health: Group and Individual Student-Robot Interaction Activities Promoting Disclosure, Learning and Positive Attitudes
Jul 17, 2024



Comprehensive sex education (SE) is crucial in promoting sexual health and responsible behavior among students, particularly in elementary schools. Despite its significance, teaching SE can be challenging due to students' attitudes, shyness, and emotional barriers. Socially assistive robots (SARs) sometimes are perceived as more trustworthy than humans, based on research showing that they are not anticipated as judgmental. Inspired by those evidences, this study aims to assess the success of a SAR as a facilitator for SE lessons for elementary school students. This study conducted two experiments to assess the effectiveness of a SAR in facilitating SE education for elementary school students. We conducted two experiments, a) a group activity in the school classroom where the Nao robot gave a SE lecture, and we evaluated how much information the students acquired from the lecture, and b) an individual activity where the students interacted 1:1 with the robot, and we evaluated their attitudes towards the subject of SE, and if they felt comfortable to ask SE related questions to the robot. Data collected from pre- and post-questionnaires, as well as video annotations, revealed that the SAR significantly improved students' attitudes toward SE. Furthermore, students were more open to asking SE-related questions to the robot than their human teacher. The study emphasized specific SAR characteristics, such as embodiment and non-judgmental behavior, as key factors contributing to their effectiveness in supporting SE education, paving the way for innovative and effective approaches to sexual education in schools.
Touch in Human Social Robot Interaction: Systematic Literature Review with PRISMA Method
Jul 16, 2024In the past two decades, there has been a continuous rise in the deployment of robots fulfilling social roles that expands across various industries such as guides, service providers, and educators. To establish robots as integral allies in daily life, it is essential for them to deliver positive and trustworthy experiences, achieved through seamless and satisfying interactions across diverse modalities and communication channels. In the realm of human-robot interactions, touch plays a pivotal role in facilitating meaningful connections and communication. To delve into the significance of haptic technologies and their impact on interactions between humans and social robots, an exploration of the existing literature is essential, since the research about touch is the most underrepresented between the other communication channels (facial expressions, movements, vocals etc). A systematic literature review has been carried out, identifying 42 articles with the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA), related to touch and haptic technologies and interaction between humans and social robots in the twenty years (2001 -2023). The results show the main differences, pros and cons between the materials and technologies that have been primary used so far, the qualitative and quantitative research that links the HRI touch studies with the human emotion and also the types of touch and repeatability of those methods. The study identifies research gaps and outlines future directions, while it serves as a guide for anyone who will be interesting in conducting HRI touch research or build a haptic system for a social robot.
Can an LLM-Powered Socially Assistive Robot Effectively and Safely Deliver Cognitive Behavioral Therapy? A Study With University Students
Feb 27, 2024
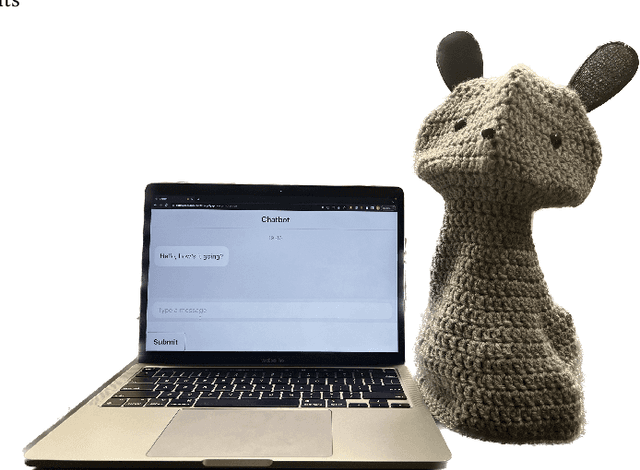
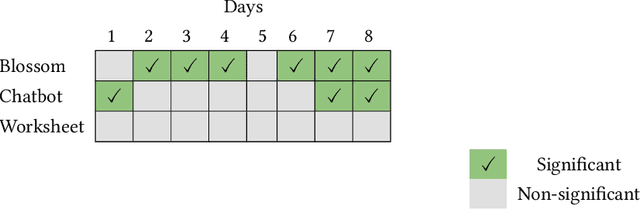

Cognitive behavioral therapy (CBT) is a widely used therapeutic method for guiding individuals toward restructuring their thinking patterns as a means of addressing anxiety, depression, and other challenges. We developed a large language model (LLM)-powered prompt-engineered socially assistive robot (SAR) that guides participants through interactive CBT at-home exercises. We evaluated the performance of the SAR through a 15-day study with 38 university students randomly assigned to interact daily with the robot or a chatbot (using the same LLM), or complete traditional CBT worksheets throughout the duration of the study. We measured weekly therapeutic outcomes, changes in pre-/post-session anxiety measures, and adherence to completing CBT exercises. We found that self-reported measures of general psychological distress significantly decreased over the study period in the robot and worksheet conditions but not the chatbot condition. Furthermore, the SAR enabled significant single-session improvements for more sessions than the other two conditions combined. Our findings suggest that SAR-guided LLM-powered CBT may be as effective as traditional worksheet methods in supporting therapeutic progress from the beginning to the end of the study and superior in decreasing user anxiety immediately after completing the CBT exercise.
Evaluating and Personalizing User-Perceived Quality of Text-to-Speech Voices for Delivering Mindfulness Meditation with Different Physical Embodiments
Jan 07, 2024Mindfulness-based therapies have been shown to be effective in improving mental health, and technology-based methods have the potential to expand the accessibility of these therapies. To enable real-time personalized content generation for mindfulness practice in these methods, high-quality computer-synthesized text-to-speech (TTS) voices are needed to provide verbal guidance and respond to user performance and preferences. However, the user-perceived quality of state-of-the-art TTS voices has not yet been evaluated for administering mindfulness meditation, which requires emotional expressiveness. In addition, work has not yet been done to study the effect of physical embodiment and personalization on the user-perceived quality of TTS voices for mindfulness. To that end, we designed a two-phase human subject study. In Phase 1, an online Mechanical Turk between-subject study (N=471) evaluated 3 (feminine, masculine, child-like) state-of-the-art TTS voices with 2 (feminine, masculine) human therapists' voices in 3 different physical embodiment settings (no agent, conversational agent, socially assistive robot) with remote participants. Building on findings from Phase 1, in Phase 2, an in-person within-subject study (N=94), we used a novel framework we developed for personalizing TTS voices based on user preferences, and evaluated user-perceived quality compared to best-rated non-personalized voices from Phase 1. We found that the best-rated human voice was perceived better than all TTS voices; the emotional expressiveness and naturalness of TTS voices were poorly rated, while users were satisfied with the clarity of TTS voices. Surprisingly, by allowing users to fine-tune TTS voice features, the user-personalized TTS voices could perform almost as well as human voices, suggesting user personalization could be a simple and very effective tool to improve user-perceived quality of TTS voice.
Service Pet Robot Design: Queer, Feminine and Sexuality Aspects
Sep 27, 2023The integration of robots and AI in society raises concerns about discrimination and biases mostly affecting underrepresented groups, including queer and feminine figures. Socially assistive robots (SAR) are being used in a variety of service and companion roles, following social norms during their interaction with humans and seem to be beneficial in many roles, such as the pet therapy robots. To promote inclusion and representation, robot design should incorporate queer and feminine characteristics. As a response to these concerns, a pet robot called BB was designed using a multidisciplinary and inclusive approach. BB was presented in a queer architecture and aesthetics environment, emphasizing aspects of techno-touch, vulnerability, and sexuality in human-robot interactions. The audience's perception of both the robot and the female researcher was evaluated through questionnaires and focus groups. This study aims to explore how technology and design can better accommodate diverse perspectives and needs in the field of SAR.