 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCleanMAP: Distilling Multimodal LLMs for Confidence-Driven Crowdsourced HD Map Updates
Apr 14, 2025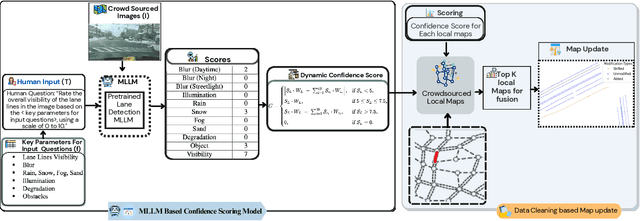
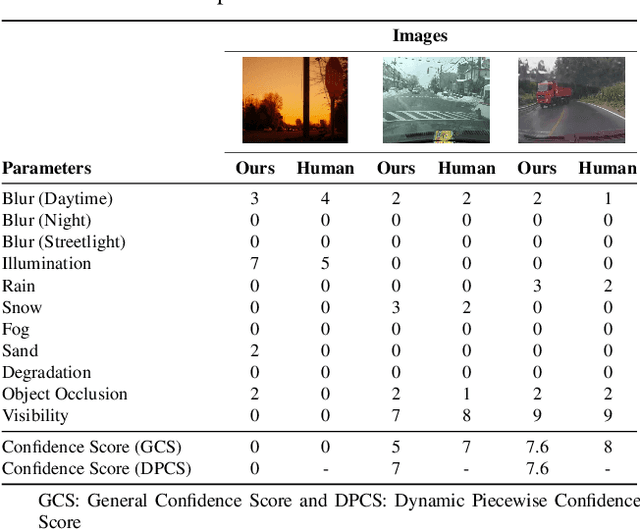

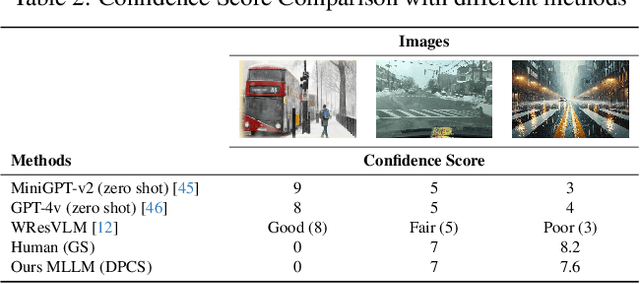
The rapid growth of intelligent connected vehicles (ICVs) and integrated vehicle-road-cloud systems has increased the demand for accurate, real-time HD map updates. However, ensuring map reliability remains challenging due to inconsistencies in crowdsourced data, which suffer from motion blur, lighting variations, adverse weather, and lane marking degradation. This paper introduces CleanMAP, a Multimodal Large Language Model (MLLM)-based distillation framework designed to filter and refine crowdsourced data for high-confidence HD map updates. CleanMAP leverages an MLLM-driven lane visibility scoring model that systematically quantifies key visual parameters, assigning confidence scores (0-10) based on their impact on lane detection. A novel dynamic piecewise confidence-scoring function adapts scores based on lane visibility, ensuring strong alignment with human evaluations while effectively filtering unreliable data. To further optimize map accuracy, a confidence-driven local map fusion strategy ranks and selects the top-k highest-scoring local maps within an optimal confidence range (best score minus 10%), striking a balance between data quality and quantity. Experimental evaluations on a real-world autonomous vehicle dataset validate CleanMAP's effectiveness, demonstrating that fusing the top three local maps achieves the lowest mean map update error of 0.28m, outperforming the baseline (0.37m) and meeting stringent accuracy thresholds (<= 0.32m). Further validation with real-vehicle data confirms 84.88% alignment with human evaluators, reinforcing the model's robustness and reliability. This work establishes CleanMAP as a scalable and deployable solution for crowdsourced HD map updates, ensuring more precise and reliable autonomous navigation. The code will be available at https://Ankit-Zefan.github.io/CleanMap/
Advancing Autonomous Vehicle Intelligence: Deep Learning and Multimodal LLM for Traffic Sign Recognition and Robust Lane Detection
Mar 08, 2025Autonomous vehicles (AVs) require reliable traffic sign recognition and robust lane detection capabilities to ensure safe navigation in complex and dynamic environments. This paper introduces an integrated approach combining advanced deep learning techniques and Multimodal Large Language Models (MLLMs) for comprehensive road perception. For traffic sign recognition, we systematically evaluate ResNet-50, YOLOv8, and RT-DETR, achieving state-of-the-art performance of 99.8% with ResNet-50, 98.0% accuracy with YOLOv8, and achieved 96.6% accuracy in RT-DETR despite its higher computational complexity. For lane detection, we propose a CNN-based segmentation method enhanced by polynomial curve fitting, which delivers high accuracy under favorable conditions. Furthermore, we introduce a lightweight, Multimodal, LLM-based framework that directly undergoes instruction tuning using small yet diverse datasets, eliminating the need for initial pretraining. This framework effectively handles various lane types, complex intersections, and merging zones, significantly enhancing lane detection reliability by reasoning under adverse conditions. Despite constraints in available training resources, our multimodal approach demonstrates advanced reasoning capabilities, achieving a Frame Overall Accuracy (FRM) of 53.87%, a Question Overall Accuracy (QNS) of 82.83%, lane detection accuracies of 99.6% in clear conditions and 93.0% at night, and robust performance in reasoning about lane invisibility due to rain (88.4%) or road degradation (95.6%). The proposed comprehensive framework markedly enhances AV perception reliability, thus contributing significantly to safer autonomous driving across diverse and challenging road scenarios.