 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Low-Cost Real-Time Spiking System for Obstacle Detection based on Ultrasonic Sensors and Rate Coding
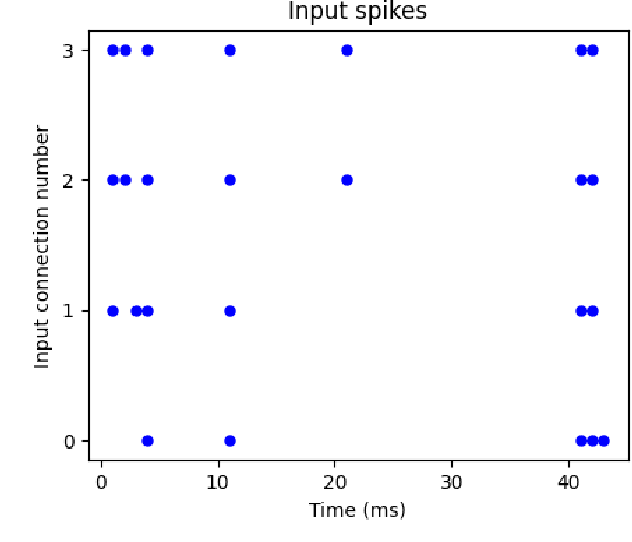
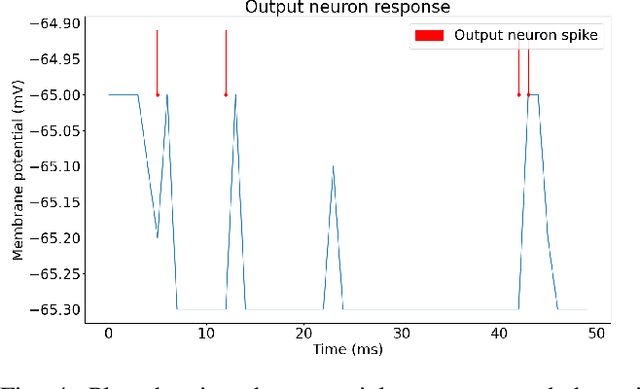
Sep 04, 2024Since the advent of mobile robots, obstacle detection has been a topic of great interest. It has also been a subject of study in neuroscience, where flying insects and bats could be considered two of the most interesting cases in terms of vision-based and sound-based mechanisms for obstacle detection, respectively. Currently, many studies focus on vision-based obstacle detection, but not many can be found regarding sound-based obstacle detection. This work focuses on the latter approach, which also makes use of a Spiking Neural Network to exploit the advantages of these architectures and achieve an approach closer to biology. The complete system was tested through a series of experiments that confirm the validity of the spiking architecture for obstacle detection. It is empirically demonstrated that, when the distance between the robot and the obstacle decreases, the output firing rate of the system increases in response as expected, and vice versa. Therefore, there is a direct relation between the two. Furthermore, there is a distance threshold between detectable and undetectable objects which is also empirically measured in this work. An in-depth study on how this system works at low level based on the Inter-Spike Interval concept was performed, which may be useful in the future development of applications based on spiking filters.
Bio-inspired computational memory model of the Hippocampus: an approach to a neuromorphic spike-based Content-Addressable Memory
Oct 09, 2023The brain has computational capabilities that surpass those of modern systems, being able to solve complex problems efficiently in a simple way. Neuromorphic engineering aims to mimic biology in order to develop new systems capable of incorporating such capabilities. Bio-inspired learning systems continue to be a challenge that must be solved, and much work needs to be done in this regard. Among all brain regions, the hippocampus stands out as an autoassociative short-term memory with the capacity to learn and recall memories from any fragment of them. These characteristics make the hippocampus an ideal candidate for developing bio-inspired learning systems that, in addition, resemble content-addressable memories. Therefore, in this work we propose a bio-inspired spiking content-addressable memory model based on the CA3 region of the hippocampus with the ability to learn, forget and recall memories, both orthogonal and non-orthogonal, from any fragment of them. The model was implemented on the SpiNNaker hardware platform using Spiking Neural Networks. A set of experiments based on functional, stress and applicability tests were performed to demonstrate its correct functioning. This work presents the first hardware implementation of a fully-functional bio-inspired spiking hippocampal content-addressable memory model, paving the way for the development of future more complex neuromorphic systems.
Bio-inspired spike-based Hippocampus and Posterior Parietal Cortex models for robot navigation and environment pseudo-mapping
May 22, 2023The brain has a great capacity for computation and efficient resolution of complex problems, far surpassing modern computers. Neuromorphic engineering seeks to mimic the basic principles of the brain to develop systems capable of achieving such capabilities. In the neuromorphic field, navigation systems are of great interest due to their potential applicability to robotics, although these systems are still a challenge to be solved. This work proposes a spike-based robotic navigation and environment pseudomapping system formed by a bio-inspired hippocampal memory model connected to a Posterior Parietal Cortex model. The hippocampus is in charge of maintaining a representation of an environment state map, and the PPC is in charge of local decision-making. This system was implemented on the SpiNNaker hardware platform using Spiking Neural Networks. A set of real-time experiments was applied to demonstrate the correct functioning of the system in virtual and physical environments on a robotic platform. The system is able to navigate through the environment to reach a goal position starting from an initial position, avoiding obstacles and mapping the environment. To the best of the authors knowledge, this is the first implementation of an environment pseudo-mapping system with dynamic learning based on a bio-inspired hippocampal memory.
A bio-inspired implementation of a sparse-learning spike-based hippocampus memory model
Jun 10, 2022



The nervous system, more specifically, the brain, is capable of solving complex problems simply and efficiently, far surpassing modern computers. In this regard, neuromorphic engineering is a research field that focuses on mimicking the basic principles that govern the brain in order to develop systems that achieve such computational capabilities. Within this field, bio-inspired learning and memory systems are still a challenge to be solved, and this is where the hippocampus is involved. It is the region of the brain that acts as a short-term memory, allowing the learning and unstructured and rapid storage of information from all the sensory nuclei of the cerebral cortex and its subsequent recall. In this work, we propose a novel bio-inspired memory model based on the hippocampus with the ability to learn memories, recall them from a cue (a part of the memory associated with the rest of the content) and even forget memories when trying to learn others with the same cue. This model has been implemented on the SpiNNaker hardware platform using Spiking Neural Networks, and a set of experiments and tests were performed to demonstrate its correct and expected operation. The proposed spike-based memory model generates spikes only when it receives an input, being energy efficient, and it needs 7 timesteps for the learning step and 6 timesteps for recalling a previously-stored memory. This work presents the first hardware implementation of a fully functional bio-inspired spike-based hippocampus memory model, paving the road for the development of future more complex neuromorphic systems.
Construction of a spike-based memory using neural-like logic gates based on Spiking Neural Networks on SpiNNaker
Jun 08, 2022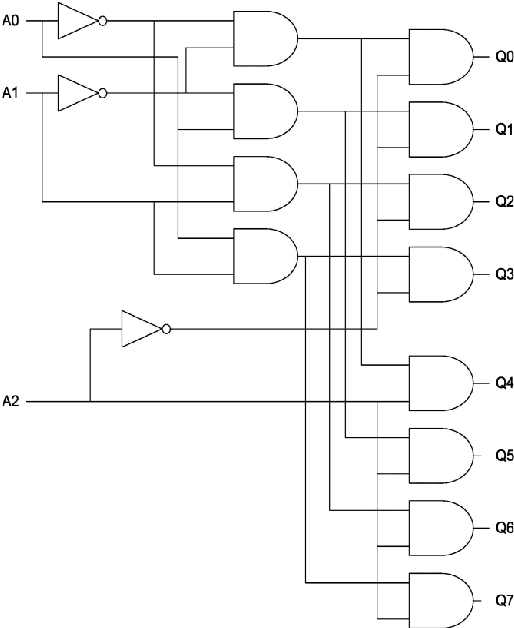
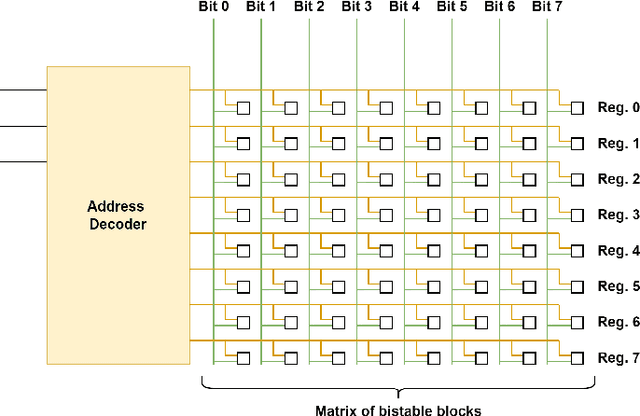
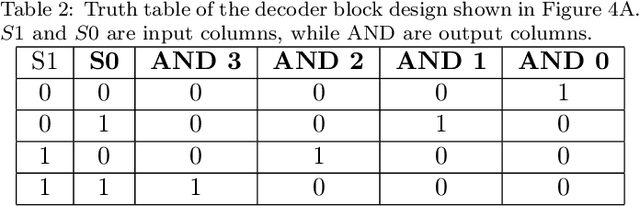
Neuromorphic engineering concentrates the efforts of a large number of researchers due to its great potential as a field of research, in a search for the exploitation of the advantages of the biological nervous system and the brain as a whole for the design of more efficient and real-time capable applications. For the development of applications as close to biology as possible, Spiking Neural Networks (SNNs) are used, considered biologically-plausible and that form the third generation of Artificial Neural Networks (ANNs). Since some SNN-based applications may need to store data in order to use it later, something that is present both in digital circuits and, in some form, in biology, a spiking memory is needed. This work presents a spiking implementation of a memory, which is one of the most important components in the computer architecture, and which could be essential in the design of a fully spiking computer. In the process of designing this spiking memory, different intermediate components were also implemented and tested. The tests were carried out on the SpiNNaker neuromorphic platform and allow to validate the approach used for the construction of the presented blocks. In addition, this work studies in depth how to build spiking blocks using this approach and includes a comparison between it and those used in other similar works focused on the design of spiking components, which include both spiking logic gates and spiking memory. All implemented blocks and developed tests are available in a public repository.
Spike-based computational models of bio-inspired memories in the hippocampal CA3 region on SpiNNaker
May 10, 2022


The human brain is the most powerful and efficient machine in existence today, surpassing in many ways the capabilities of modern computers. Currently, lines of research in neuromorphic engineering are trying to develop hardware that mimics the functioning of the brain to acquire these superior capabilities. One of the areas still under development is the design of bio-inspired memories, where the hippocampus plays an important role. This region of the brain acts as a short-term memory with the ability to store associations of information from different sensory streams in the brain and recall them later. This is possible thanks to the recurrent collateral network architecture that constitutes CA3, the main sub-region of the hippocampus. In this work, we developed two spike-based computational models of fully functional hippocampal bio-inspired memories for the storage and recall of complex patterns implemented with spiking neural networks on the SpiNNaker hardware platform. These models present different levels of biological abstraction, with the first model having a constant oscillatory activity closer to the biological model, and the second one having an energy-efficient regulated activity, which, although it is still bio-inspired, opts for a more functional approach. Different experiments were performed for each of the models, in order to test their learning/recalling capabilities. A comprehensive comparison between the functionality and the biological plausibility of the presented models was carried out, showing their strengths and weaknesses. The two models, which are publicly available for researchers, could pave the way for future spike-based implementations and applications.
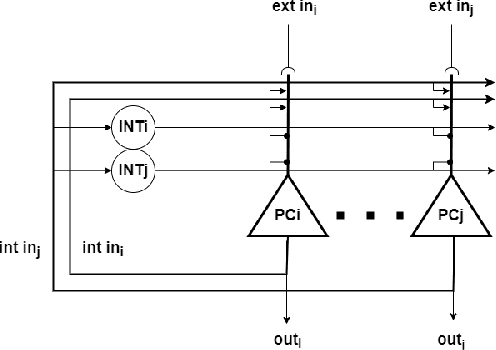
Spike-based building blocks for performing logic operations using Spiking Neural Networks on SpiNNaker
May 09, 2022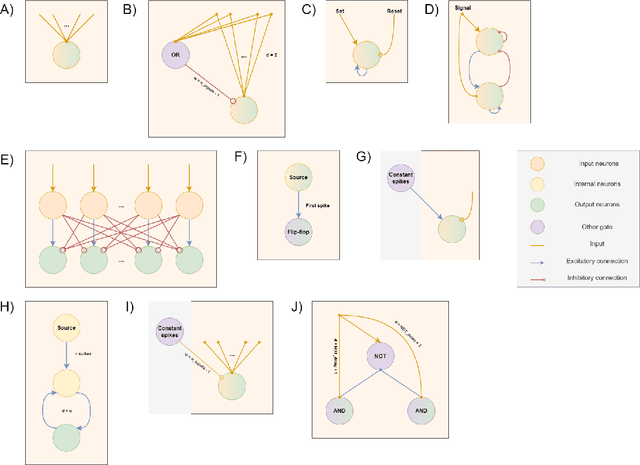

One of the most interesting and still growing scientific fields is neuromorphic engineering, which is focused on studying and designing hardware and software with the purpose of mimicking the basic principles of biological nervous systems. Currently, there are many research groups developing practical applications based on neuroscientific knowledge. This work provides researchers with a novel toolkit of building blocks based on Spiking Neural Networks that emulate the behavior of different logic gates. These could be very useful in many spike-based applications, since logic gates are the basis of digital circuits. The designs and models proposed are presented and implemented on a SpiNNaker hardware platform. Different experiments were performed in order to validate the expected behavior, and the obtained results are discussed. The functionality of traditional logic gates and the proposed blocks is studied, and the feasibility of the presented approach is discussed.
An MPSoC-based on-line Edge Infrastructure for Embedded Neuromorphic Robotic Controllers
Mar 31, 2022
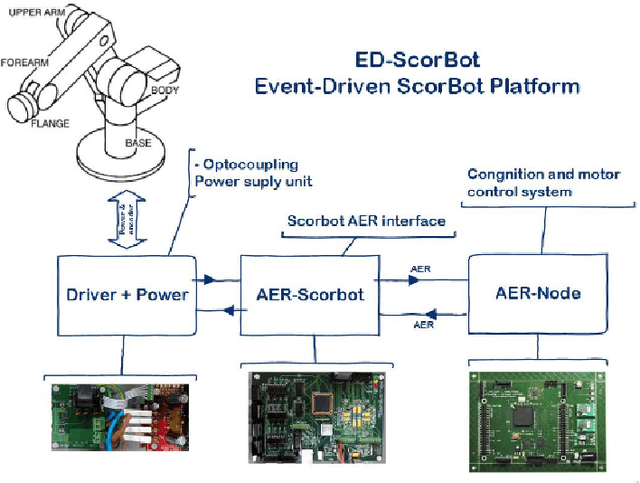


In this work, an all-in-one neuromorphic controller system with reduced latency and power consumption for a robotic arm is presented. Biological muscle movement consists of stretching and shrinking fibres via spike-commanded signals that come from motor neurons, which in turn are connected to a central pattern generator neural structure. In addition, biological systems are able to respond to diverse stimuli rather fast and efficiently, and this is based on the way information is coded within neural processes. As opposed to human-created encoding systems, neural ones use neurons and spikes to process the information and make weighted decisions based on a continuous learning process. The Event-Driven Scorbot platform (ED-Scorbot) consists of a 6 Degrees of Freedom (DoF) robotic arm whose controller implements a Spiking Proportional-Integrative- Derivative algorithm, mimicking in this way the previously commented biological systems. In this paper, we present an infrastructure upgrade to the ED-Scorbot platform, replacing the controller hardware, which was comprised of two Spartan Field Programmable Gate Arrays (FPGAs) and a barebone computer, with an edge device, the Xilinx Zynq-7000 SoC (System on Chip) which reduces the response time, power consumption and overall complexity.
Event Based Time-Vectors for auditory features extraction: a neuromorphic approach for low power audio recognition
Dec 13, 2021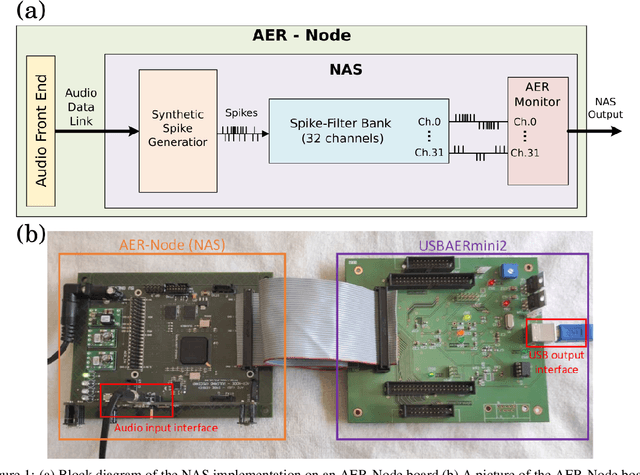
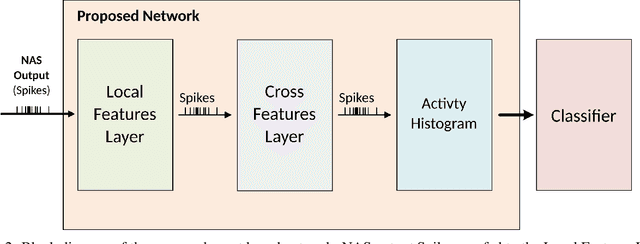
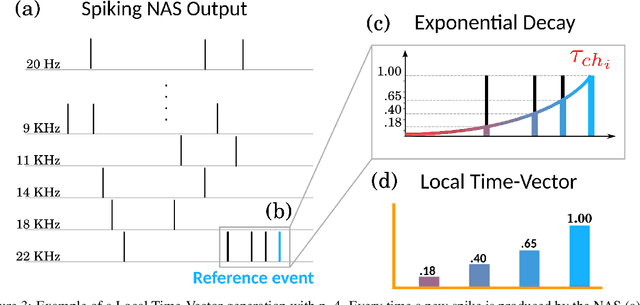
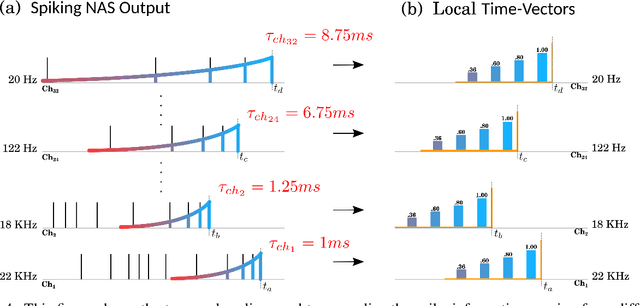
In recent years tremendous efforts have been done to advance the state of the art for Natural Language Processing (NLP) and audio recognition. However, these efforts often translated in increased power consumption and memory requirements for bigger and more complex models. These solutions falls short of the constraints of IoT devices which need low power, low memory efficient computation, and therefore they fail to meet the growing demand of efficient edge computing. Neuromorphic systems have proved to be excellent candidates for low-power low-latency computation in a multitude of applications. For this reason we present a neuromorphic architecture, capable of unsupervised auditory feature recognition. We then validate the network on a subset of Google's Speech Commands dataset.
Wide & Deep neural network model for patch aggregation in CNN-based prostate cancer detection systems
May 20, 2021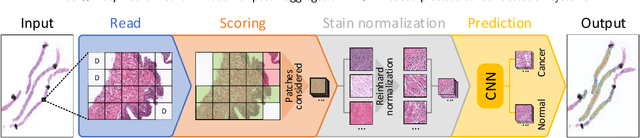
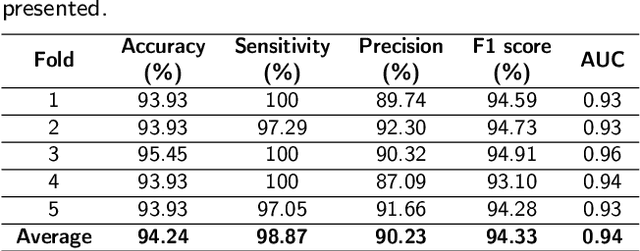
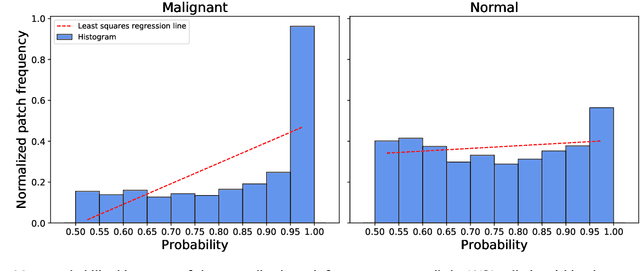
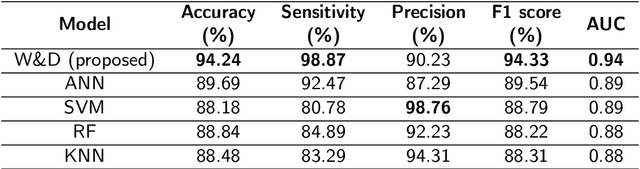
Prostate cancer (PCa) is one of the most commonly diagnosed cancer and one of the leading causes of death among men, with almost 1.41 million new cases and around 375,000 deaths in 2020. Artificial Intelligence algorithms have had a huge impact in medical image analysis, including digital histopathology, where Convolutional Neural Networks (CNNs) are used to provide a fast and accurate diagnosis, supporting experts in this task. To perform an automatic diagnosis, prostate tissue samples are first digitized into gigapixel-resolution whole-slide images. Due to the size of these images, neural networks cannot use them as input and, therefore, small subimages called patches are extracted and predicted, obtaining a patch-level classification. In this work, a novel patch aggregation method based on a custom Wide & Deep neural network model is presented, which performs a slide-level classification using the patch-level classes obtained from a CNN. The malignant tissue ratio, a 10-bin malignant probability histogram, the least squares regression line of the histogram, and the number of malignant connected components are used by the proposed model to perform the classification. An accuracy of 94.24% and a sensitivity of 98.87% were achieved, proving that the proposed system could aid pathologists by speeding up the screening process and, thus, contribute to the fight against PCa.