 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-inspired spike-based Hippocampus and Posterior Parietal Cortex models for robot navigation and environment pseudo-mapping
May 22, 2023The brain has a great capacity for computation and efficient resolution of complex problems, far surpassing modern computers. Neuromorphic engineering seeks to mimic the basic principles of the brain to develop systems capable of achieving such capabilities. In the neuromorphic field, navigation systems are of great interest due to their potential applicability to robotics, although these systems are still a challenge to be solved. This work proposes a spike-based robotic navigation and environment pseudomapping system formed by a bio-inspired hippocampal memory model connected to a Posterior Parietal Cortex model. The hippocampus is in charge of maintaining a representation of an environment state map, and the PPC is in charge of local decision-making. This system was implemented on the SpiNNaker hardware platform using Spiking Neural Networks. A set of real-time experiments was applied to demonstrate the correct functioning of the system in virtual and physical environments on a robotic platform. The system is able to navigate through the environment to reach a goal position starting from an initial position, avoiding obstacles and mapping the environment. To the best of the authors knowledge, this is the first implementation of an environment pseudo-mapping system with dynamic learning based on a bio-inspired hippocampal memory.
NeuroPod: a real-time neuromorphic spiking CPG applied to robotics
Apr 25, 2019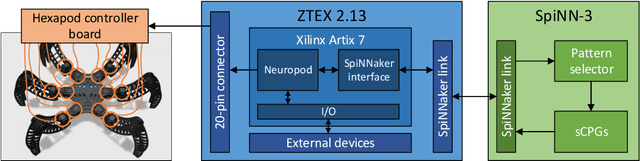

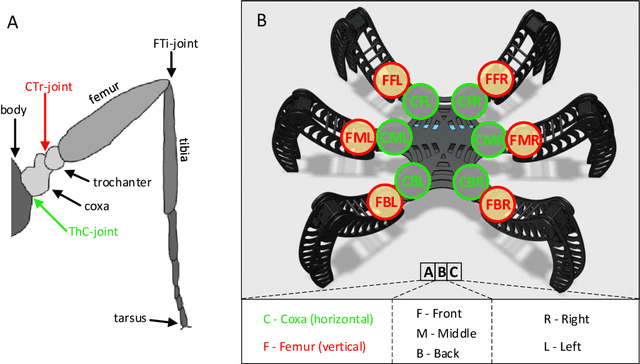
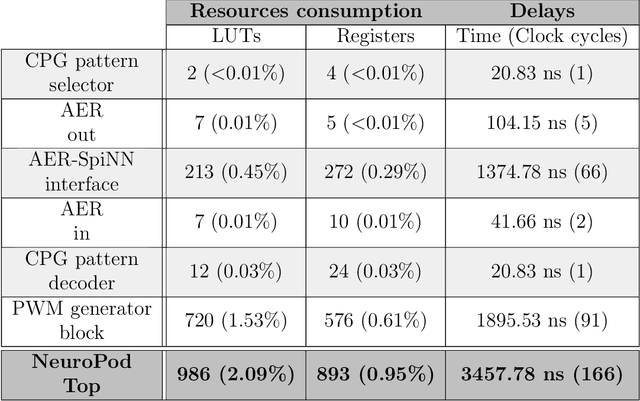
Initially, robots were developed with the aim of making our life easier, carrying out repetitive or dangerous tasks for humans. Although they were able to perform these tasks, the latest generation of robots are being designed to take a step further, by performing more complex tasks that have been carried out by smart animals or humans up to date. To this end, inspiration needs to be taken from biological examples. For instance, insects are able to optimally solve complex environment navigation problems, and many researchers have started to mimic how these insects behave. Recent interest in neuromorphic engineering has motivated us to present a real-time, neuromorphic, spike-based Central Pattern Generator of application in neurorobotics, using an arthropod-like robot. A Spiking Neural Network was designed and implemented on SpiNNaker. The network models a complex, online-change capable Central Pattern Generator which generates three gaits for a hexapod robot locomotion. Reconfigurable hardware was used to manage both the motors of the robot and the real-time communication interface with the Spiking Neural Networks. Real-time measurements confirm the simulation results, and locomotion tests show that NeuroPod can perform the gaits without any balance loss or added delay.