 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Low-Cost Real-Time Spiking System for Obstacle Detection based on Ultrasonic Sensors and Rate Coding
Sep 04, 2024Since the advent of mobile robots, obstacle detection has been a topic of great interest. It has also been a subject of study in neuroscience, where flying insects and bats could be considered two of the most interesting cases in terms of vision-based and sound-based mechanisms for obstacle detection, respectively. Currently, many studies focus on vision-based obstacle detection, but not many can be found regarding sound-based obstacle detection. This work focuses on the latter approach, which also makes use of a Spiking Neural Network to exploit the advantages of these architectures and achieve an approach closer to biology. The complete system was tested through a series of experiments that confirm the validity of the spiking architecture for obstacle detection. It is empirically demonstrated that, when the distance between the robot and the obstacle decreases, the output firing rate of the system increases in response as expected, and vice versa. Therefore, there is a direct relation between the two. Furthermore, there is a distance threshold between detectable and undetectable objects which is also empirically measured in this work. An in-depth study on how this system works at low level based on the Inter-Spike Interval concept was performed, which may be useful in the future development of applications based on spiking filters.
NeuroPod: a real-time neuromorphic spiking CPG applied to robotics
Apr 25, 2019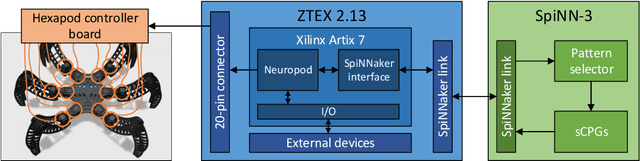

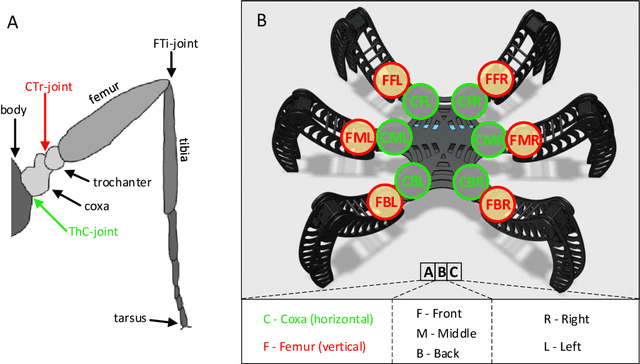
Initially, robots were developed with the aim of making our life easier, carrying out repetitive or dangerous tasks for humans. Although they were able to perform these tasks, the latest generation of robots are being designed to take a step further, by performing more complex tasks that have been carried out by smart animals or humans up to date. To this end, inspiration needs to be taken from biological examples. For instance, insects are able to optimally solve complex environment navigation problems, and many researchers have started to mimic how these insects behave. Recent interest in neuromorphic engineering has motivated us to present a real-time, neuromorphic, spike-based Central Pattern Generator of application in neurorobotics, using an arthropod-like robot. A Spiking Neural Network was designed and implemented on SpiNNaker. The network models a complex, online-change capable Central Pattern Generator which generates three gaits for a hexapod robot locomotion. Reconfigurable hardware was used to manage both the motors of the robot and the real-time communication interface with the Spiking Neural Networks. Real-time measurements confirm the simulation results, and locomotion tests show that NeuroPod can perform the gaits without any balance loss or added delay.