 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWide & Deep neural network model for patch aggregation in CNN-based prostate cancer detection systems
May 20, 2021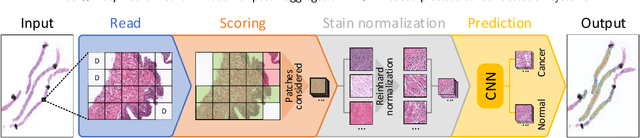
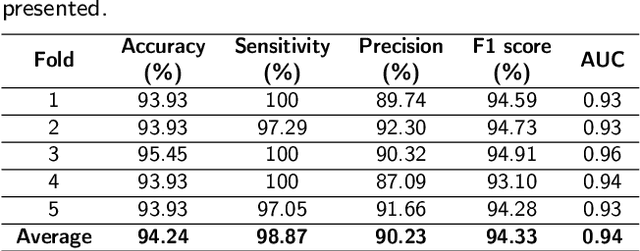
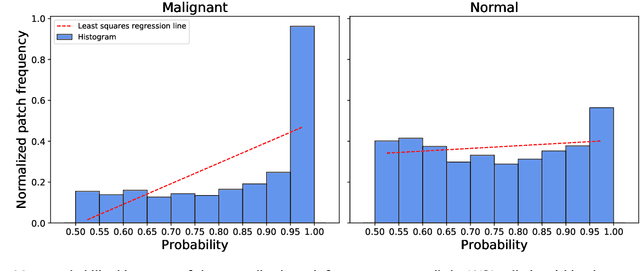
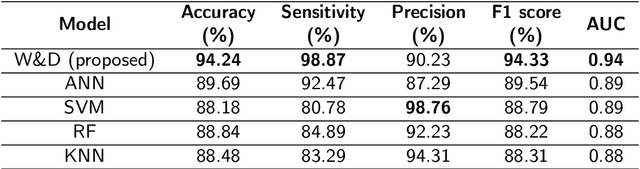
Prostate cancer (PCa) is one of the most commonly diagnosed cancer and one of the leading causes of death among men, with almost 1.41 million new cases and around 375,000 deaths in 2020. Artificial Intelligence algorithms have had a huge impact in medical image analysis, including digital histopathology, where Convolutional Neural Networks (CNNs) are used to provide a fast and accurate diagnosis, supporting experts in this task. To perform an automatic diagnosis, prostate tissue samples are first digitized into gigapixel-resolution whole-slide images. Due to the size of these images, neural networks cannot use them as input and, therefore, small subimages called patches are extracted and predicted, obtaining a patch-level classification. In this work, a novel patch aggregation method based on a custom Wide & Deep neural network model is presented, which performs a slide-level classification using the patch-level classes obtained from a CNN. The malignant tissue ratio, a 10-bin malignant probability histogram, the least squares regression line of the histogram, and the number of malignant connected components are used by the proposed model to perform the classification. An accuracy of 94.24% and a sensitivity of 98.87% were achieved, proving that the proposed system could aid pathologists by speeding up the screening process and, thus, contribute to the fight against PCa.
NeuroPod: a real-time neuromorphic spiking CPG applied to robotics
Apr 25, 2019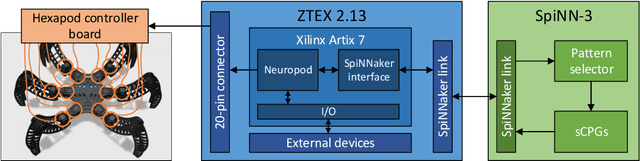

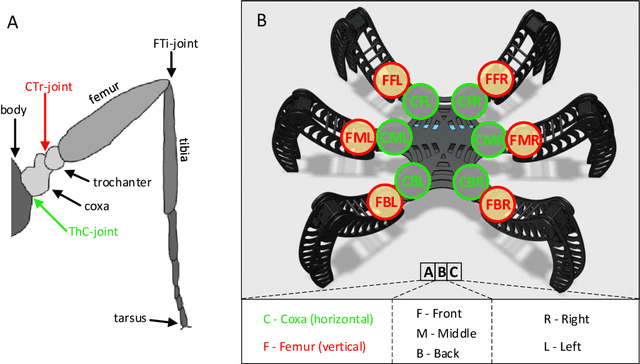
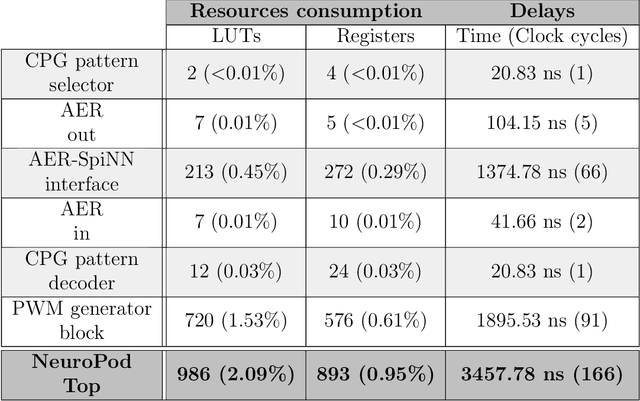
Initially, robots were developed with the aim of making our life easier, carrying out repetitive or dangerous tasks for humans. Although they were able to perform these tasks, the latest generation of robots are being designed to take a step further, by performing more complex tasks that have been carried out by smart animals or humans up to date. To this end, inspiration needs to be taken from biological examples. For instance, insects are able to optimally solve complex environment navigation problems, and many researchers have started to mimic how these insects behave. Recent interest in neuromorphic engineering has motivated us to present a real-time, neuromorphic, spike-based Central Pattern Generator of application in neurorobotics, using an arthropod-like robot. A Spiking Neural Network was designed and implemented on SpiNNaker. The network models a complex, online-change capable Central Pattern Generator which generates three gaits for a hexapod robot locomotion. Reconfigurable hardware was used to manage both the motors of the robot and the real-time communication interface with the Spiking Neural Networks. Real-time measurements confirm the simulation results, and locomotion tests show that NeuroPod can perform the gaits without any balance loss or added delay.