 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Dependency Dynamics in Multi-Agent Reinforcement Learning for Traffic Signal Control
Feb 23, 2025Reinforcement learning (RL) emerges as a promising data-driven approach for adaptive traffic signal control (ATSC) in complex urban traffic networks, with deep neural networks substantially augmenting its learning capabilities. However, centralized RL becomes impractical for ATSC involving multiple agents due to the exceedingly high dimensionality of the joint action space. Multi-agent RL (MARL) mitigates this scalability issue by decentralizing control to local RL agents. Nevertheless, this decentralized method introduces new challenges: the environment becomes partially observable from the perspective of each local agent due to constrained inter-agent communication. Both centralized RL and MARL exhibit distinct strengths and weaknesses, particularly under heavy intersectional traffic conditions. In this paper, we justify that MARL can achieve the optimal global Q-value by separating into multiple IRL (Independent Reinforcement Learning) processes when no spill-back congestion occurs (no agent dependency) among agents (intersections). In the presence of spill-back congestion (with agent dependency), the maximum global Q-value can be achieved by using centralized RL. Building upon the conclusions, we propose a novel Dynamic Parameter Update Strategy for Deep Q-Network (DQN-DPUS), which updates the weights and bias based on the dependency dynamics among agents, i.e. updating only the diagonal sub-matrices for the scenario without spill-back congestion. We validate the DQN-DPUS in a simple network with two intersections under varying traffic, and show that the proposed strategy can speed up the convergence rate without sacrificing optimal exploration. The results corroborate our theoretical findings, demonstrating the efficacy of DQN-DPUS in optimizing traffic signal control.
Domain Adversarial Spatial-Temporal Network: A Transferable Framework for Short-term Traffic Forecasting across Cities
Feb 08, 2022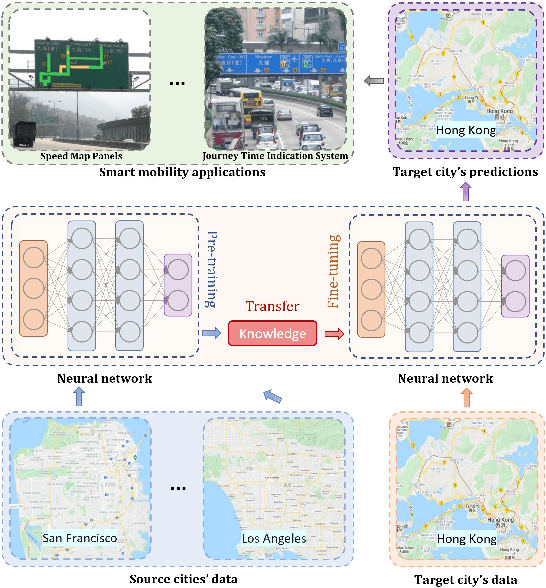
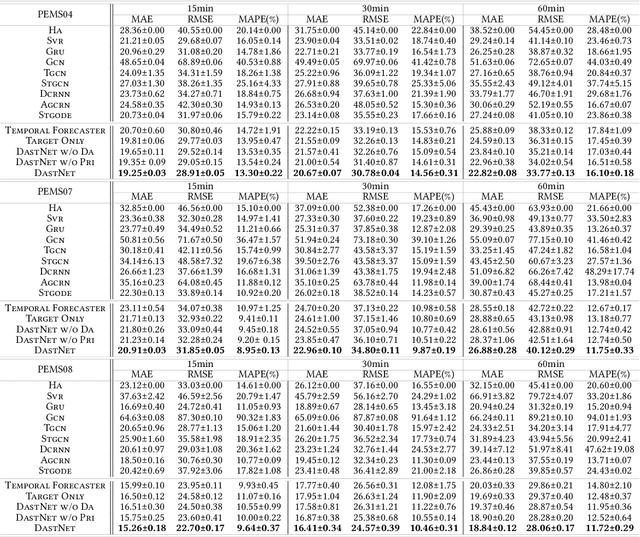
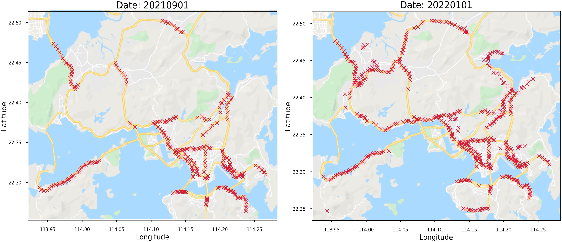
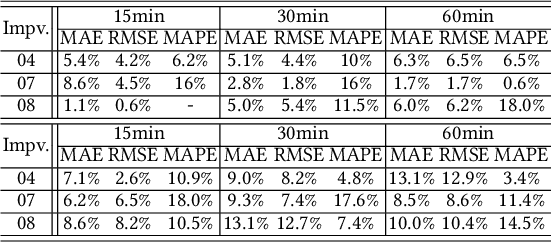
Accurate real-time traffic forecast is critical for intelligent transportation systems (ITS) and it serves as the cornerstone of various smart mobility applications. Though this research area is dominated by deep learning, recent studies indicate that the accuracy improvement by developing new model structures is becoming marginal. Instead, we envision that the improvement can be achieved by transferring the "forecasting-related knowledge" across cities with different data distributions and network topologies. To this end, this paper aims to propose a novel transferable traffic forecasting framework: Domain Adversarial Spatial-Temporal Network (DASTNet). DASTNet is pre-trained on multiple source networks and fine-tuned with the target network's traffic data. Specifically, we leverage the graph representation learning and adversarial domain adaptation techniques to learn the domain-invariant node embeddings, which are further incorporated to model the temporal traffic data. To the best of our knowledge, we are the first to employ adversarial multi-domain adaptation for network-wide traffic forecasting problems. DASTNet consistently outperforms all state-of-the-art baseline methods on three benchmark datasets. The trained DASTNet is applied to Hong Kong's new traffic detectors, and accurate traffic predictions can be delivered immediately (within one day) when the detector is available. Overall, this study suggests an alternative to enhance the traffic forecasting methods and provides practical implications for cities lacking historical traffic data.
Turning Traffic Monitoring Cameras into Intelligent Sensors for Traffic Density Estimation
Oct 29, 2021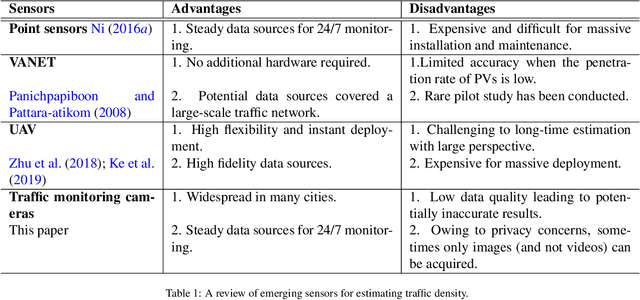
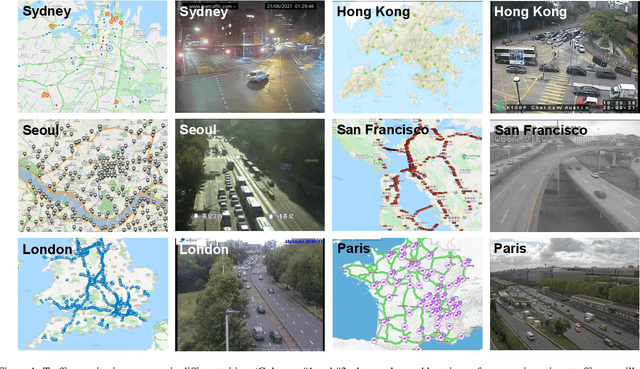
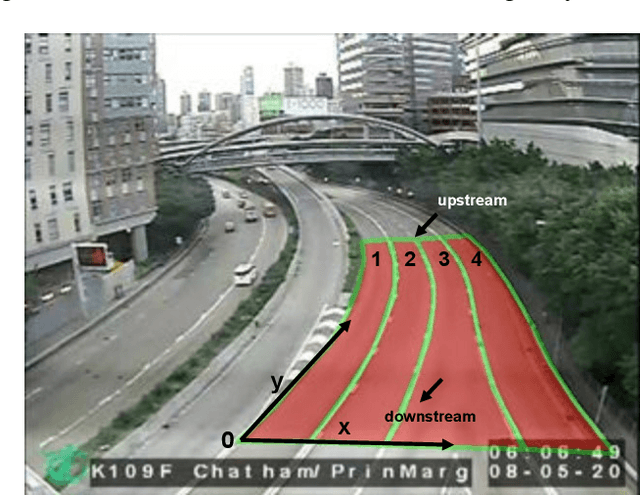
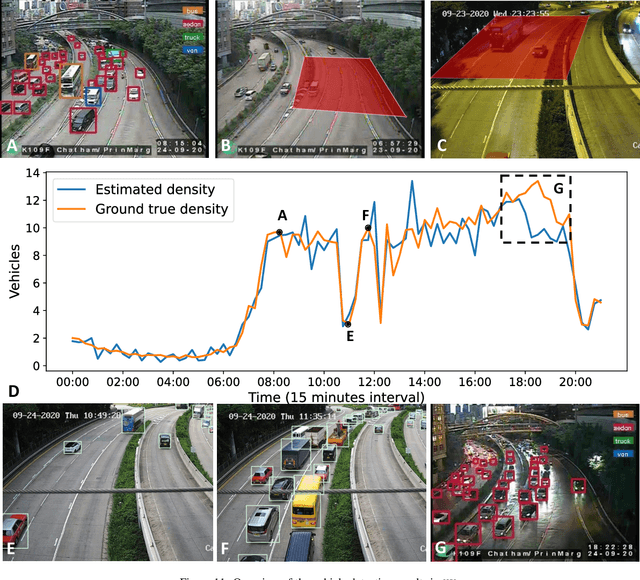
Accurate traffic state information plays a pivotal role in the Intelligent Transportation Systems (ITS), and it is an essential input to various smart mobility applications such as signal coordination and traffic flow prediction. The current practice to obtain the traffic state information is through specialized sensors such as loop detectors and speed cameras. In most metropolitan areas, traffic monitoring cameras have been installed to monitor the traffic conditions on arterial roads and expressways, and the collected videos or images are mainly used for visual inspection by traffic engineers. Unfortunately, the data collected from traffic monitoring cameras are affected by the 4L characteristics: Low frame rate, Low resolution, Lack of annotated data, and Located in complex road environments. Therefore, despite the great potentials of the traffic monitoring cameras, the 4L characteristics hinder them from providing useful traffic state information (e.g., speed, flow, density). This paper focuses on the traffic density estimation problem as it is widely applicable to various traffic surveillance systems. To the best of our knowledge, there is a lack of the holistic framework for addressing the 4L characteristics and extracting the traffic density information from traffic monitoring camera data. In view of this, this paper proposes a framework for estimating traffic density using uncalibrated traffic monitoring cameras with 4L characteristics. The proposed framework consists of two major components: camera calibration and vehicle detection. The camera calibration method estimates the actual length between pixels in the images and videos, and the vehicle counts are extracted from the deep-learning-based vehicle detection method. Combining the two components, high-granular traffic density can be estimated. To validate the proposed framework, two case studies were conducted in Hong Kong and Sacramento. The results show that the Mean Absolute Error (MAE) in camera calibration is less than 0.2 meters out of 6 meters, and the accuracy of vehicle detection under various conditions is approximately 90%. Overall, the MAE for the estimated density is 9.04 veh/km/lane in Hong Kong and 1.30 veh/km/lane in Sacramento. The research outcomes can be used to calibrate the speed-density fundamental diagrams, and the proposed framework can provide accurate and real-time traffic information without installing additional sensors.