 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sober Look at Progress in Language Model Reasoning: Pitfalls and Paths to Reproducibility
Apr 09, 2025Reasoning has emerged as the next major frontier for language models (LMs), with rapid advances from both academic and industrial labs. However, this progress often outpaces methodological rigor, with many evaluations relying on benchmarking practices that lack transparency, robustness, or statistical grounding. In this work, we conduct a comprehensive empirical study and find that current mathematical reasoning benchmarks are highly sensitive to subtle implementation choices - including decoding parameters, random seeds, prompt formatting, and even hardware and software-framework configurations. Performance gains reported in recent studies frequently hinge on unclear comparisons or unreported sources of variance. To address these issues, we propose a standardized evaluation framework with clearly defined best practices and reporting standards. Using this framework, we reassess recent methods and find that reinforcement learning (RL) approaches yield only modest improvements - far below prior claims - and are prone to overfitting, especially on small-scale benchmarks like AIME24. In contrast, supervised finetuning (SFT) methods show consistently stronger generalization. To foster reproducibility, we release all code, prompts, and model outputs, for reasoning benchmarks, establishing more rigorous foundations for future work.
Project Alexandria: Towards Freeing Scientific Knowledge from Copyright Burdens via LLMs
Feb 26, 2025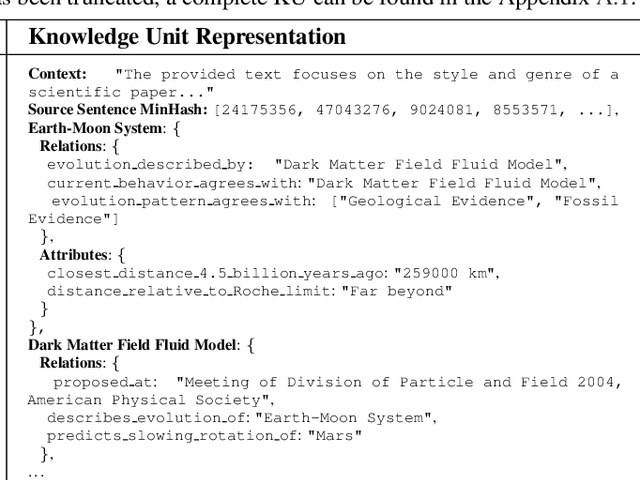
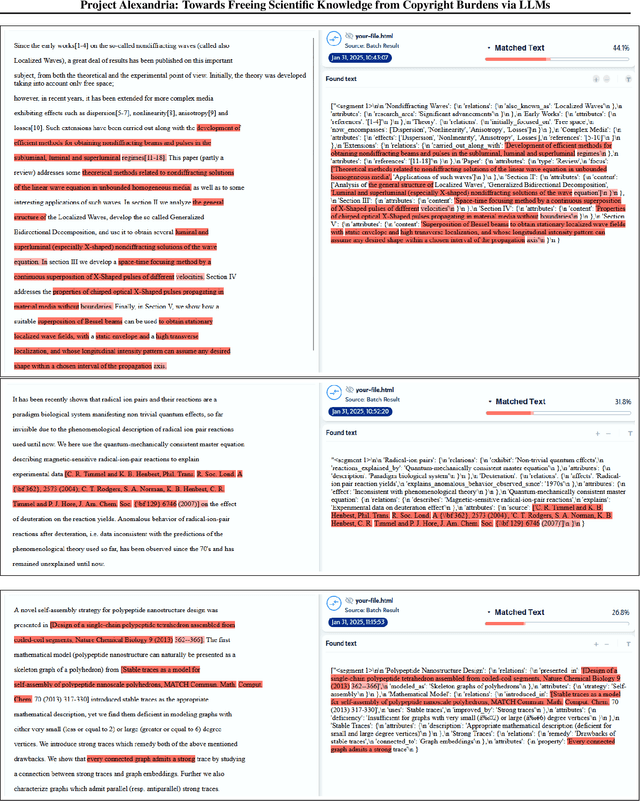
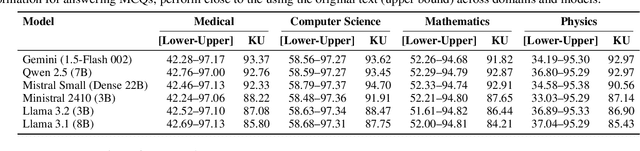
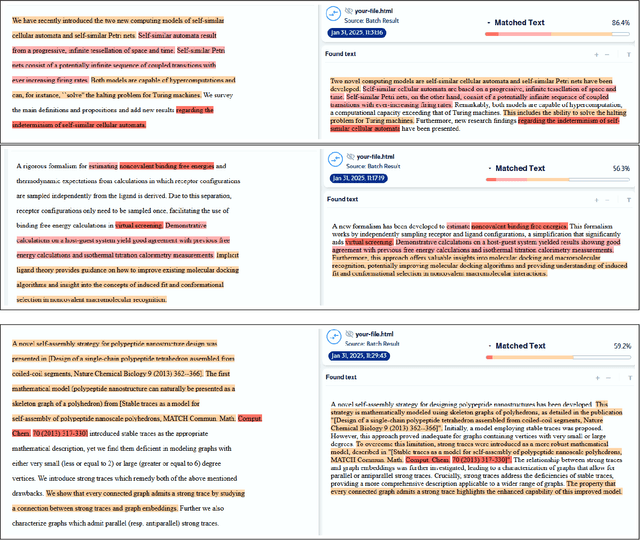
Paywalls, licenses and copyright rules often restrict the broad dissemination and reuse of scientific knowledge. We take the position that it is both legally and technically feasible to extract the scientific knowledge in scholarly texts. Current methods, like text embeddings, fail to reliably preserve factual content, and simple paraphrasing may not be legally sound. We urge the community to adopt a new idea: convert scholarly documents into Knowledge Units using LLMs. These units use structured data capturing entities, attributes and relationships without stylistic content. We provide evidence that Knowledge Units: (1) form a legally defensible framework for sharing knowledge from copyrighted research texts, based on legal analyses of German copyright law and U.S. Fair Use doctrine, and (2) preserve most (~95%) factual knowledge from original text, measured by MCQ performance on facts from the original copyrighted text across four research domains. Freeing scientific knowledge from copyright promises transformative benefits for scientific research and education by allowing language models to reuse important facts from copyrighted text. To support this, we share open-source tools for converting research documents into Knowledge Units. Overall, our work posits the feasibility of democratizing access to scientific knowledge while respecting copyright.
Learning Contact Dynamics using Physically Structured Neural Networks
Feb 22, 2021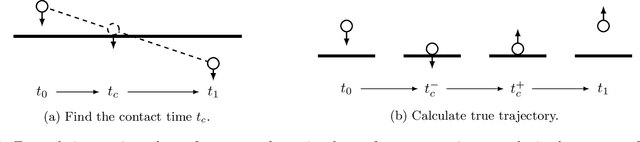
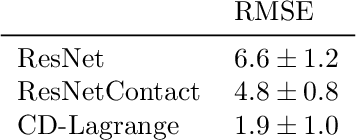
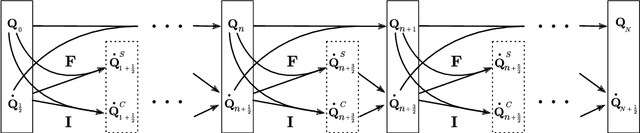

Learning physically structured representations of dynamical systems that include contact between different objects is an important problem for learning-based approaches in robotics. Black-box neural networks can learn to approximately represent discontinuous dynamics, but they typically require large quantities of data and often suffer from pathological behaviour when forecasting for longer time horizons. In this work, we use connections between deep neural networks and differential equations to design a family of deep network architectures for representing contact dynamics between objects. We show that these networks can learn discontinuous contact events in a data-efficient manner from noisy observations in settings that are traditionally difficult for black-box approaches and recent physics inspired neural networks. Our results indicate that an idealised form of touch feedback -- which is heavily relied upon by biological systems -- is a key component of making this learning problem tractable. Together with the inductive biases introduced through the network architectures, our techniques enable accurate learning of contact dynamics from observations.