 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCHIP: A multi-sensor dataset for 6D pose estimation of chairs in industrial settings
Jun 11, 2025Accurate 6D pose estimation of complex objects in 3D environments is essential for effective robotic manipulation. Yet, existing benchmarks fall short in evaluating 6D pose estimation methods under realistic industrial conditions, as most datasets focus on household objects in domestic settings, while the few available industrial datasets are limited to artificial setups with objects placed on tables. To bridge this gap, we introduce CHIP, the first dataset designed for 6D pose estimation of chairs manipulated by a robotic arm in a real-world industrial environment. CHIP includes seven distinct chairs captured using three different RGBD sensing technologies and presents unique challenges, such as distractor objects with fine-grained differences and severe occlusions caused by the robotic arm and human operators. CHIP comprises 77,811 RGBD images annotated with ground-truth 6D poses automatically derived from the robot's kinematics, averaging 11,115 annotations per chair. We benchmark CHIP using three zero-shot 6D pose estimation methods, assessing performance across different sensor types, localization priors, and occlusion levels. Results show substantial room for improvement, highlighting the unique challenges posed by the dataset. CHIP will be publicly released.
Accurate and efficient zero-shot 6D pose estimation with frozen foundation models
Jun 11, 2025Estimating the 6D pose of objects from RGBD data is a fundamental problem in computer vision, with applications in robotics and augmented reality. A key challenge is achieving generalization to novel objects that were not seen during training. Most existing approaches address this by scaling up training on synthetic data tailored to the task, a process that demands substantial computational resources. But is task-specific training really necessary for accurate and efficient 6D pose estimation of novel objects? To answer No!, we introduce FreeZeV2, the second generation of FreeZe: a training-free method that achieves strong generalization to unseen objects by leveraging geometric and vision foundation models pre-trained on unrelated data. FreeZeV2 improves both accuracy and efficiency over FreeZe through three key contributions: (i) a sparse feature extraction strategy that reduces inference-time computation without sacrificing accuracy; (ii) a feature-aware scoring mechanism that improves both pose selection during RANSAC-based 3D registration and the final ranking of pose candidates; and (iii) a modular design that supports ensembles of instance segmentation models, increasing robustness to segmentation masks errors. We evaluate FreeZeV2 on the seven core datasets of the BOP Benchmark, where it establishes a new state-of-the-art in 6D pose estimation of unseen objects. When using the same segmentation masks, FreeZeV2 achieves a remarkable 8x speedup over FreeZe while also improving accuracy by 5%. When using ensembles of segmentation models, FreeZeV2 gains an additional 8% in accuracy while still running 2.5x faster than FreeZe. FreeZeV2 was awarded Best Overall Method at the BOP Challenge 2024.
Distilling 3D distinctive local descriptors for 6D pose estimation
Mar 20, 2025Three-dimensional local descriptors are crucial for encoding geometric surface properties, making them essential for various point cloud understanding tasks. Among these descriptors, GeDi has demonstrated strong zero-shot 6D pose estimation capabilities but remains computationally impractical for real-world applications due to its expensive inference process. Can we retain GeDi's effectiveness while significantly improving its efficiency? In this paper, we explore this question by introducing a knowledge distillation framework that trains an efficient student model to regress local descriptors from a GeDi teacher. Our key contributions include: an efficient large-scale training procedure that ensures robustness to occlusions and partial observations while operating under compute and storage constraints, and a novel loss formulation that handles weak supervision from non-distinctive teacher descriptors. We validate our approach on five BOP Benchmark datasets and demonstrate a significant reduction in inference time while maintaining competitive performance with existing methods, bringing zero-shot 6D pose estimation closer to real-time feasibility. Project Website: https://tev-fbk.github.io/dGeDi/
Wild Berry image dataset collected in Finnish forests and peatlands using drones
May 15, 2024Berry picking has long-standing traditions in Finland, yet it is challenging and can potentially be dangerous. The integration of drones equipped with advanced imaging techniques represents a transformative leap forward, optimising harvests and promising sustainable practices. We propose WildBe, the first image dataset of wild berries captured in peatlands and under the canopy of Finnish forests using drones. Unlike previous and related datasets, WildBe includes new varieties of berries, such as bilberries, cloudberries, lingonberries, and crowberries, captured under severe light variations and in cluttered environments. WildBe features 3,516 images, including a total of 18,468 annotated bounding boxes. We carry out a comprehensive analysis of WildBe using six popular object detectors, assessing their effectiveness in berry detection across different forest regions and camera types. We will release WildBe publicly.
Object 6D pose estimation meets zero-shot learning
Dec 01, 2023Object 6D pose estimation methods can achieve high accuracy when trained and tested on the same objects. However, estimating the pose of objects that are absent at training time is still a challenge. In this work, we advance the state-of-the-art in zero-shot object 6D pose estimation by proposing the first method that fuses the contribution of pre-trained geometric and vision foundation models. Unlike state-of-the-art approaches that train their pipeline on data specifically crafted for the 6D pose estimation task, our method does not require task-specific finetuning. Instead, our method, which we name PoMZ, combines geometric descriptors learned from point cloud data with visual features learned from large-scale web images to produce distinctive 3D point-level descriptors. By applying an off-the-shelf registration algorithm, like RANSAC, PoMZ outperforms all state-of-the-art zero-shot object 6D pose estimation approaches. We extensively evaluate PoMZ across the seven core datasets of the BOP Benchmark, encompassing over a hundred objects and 20 thousand images captured in diverse scenarios. PoMZ ranks first in the BOP Benchmark under the category Task 4: 6D localization of unseen objects. We will release the source code publicly.
The MONET dataset: Multimodal drone thermal dataset recorded in rural scenarios
Apr 11, 2023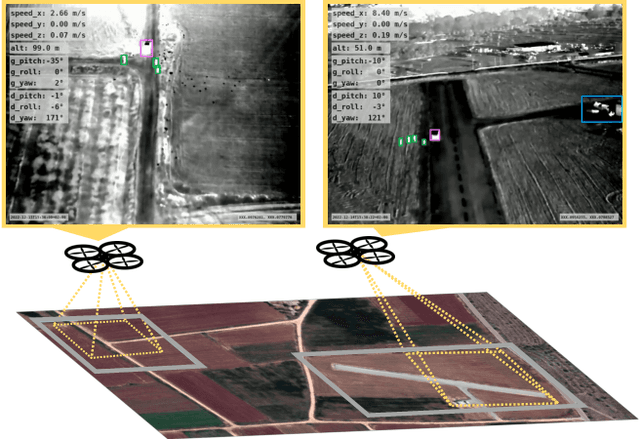
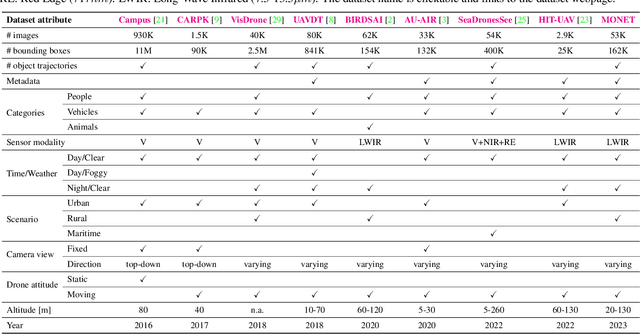
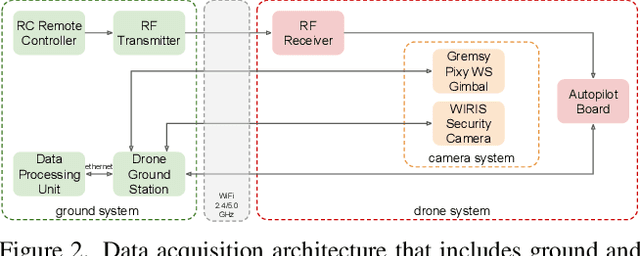
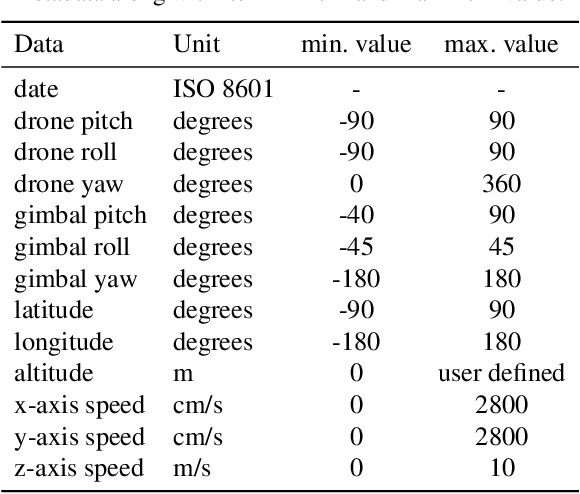
We present MONET, a new multimodal dataset captured using a thermal camera mounted on a drone that flew over rural areas, and recorded human and vehicle activities. We captured MONET to study the problem of object localisation and behaviour understanding of targets undergoing large-scale variations and being recorded from different and moving viewpoints. Target activities occur in two different land sites, each with unique scene structures and cluttered backgrounds. MONET consists of approximately 53K images featuring 162K manually annotated bounding boxes. Each image is timestamp-aligned with drone metadata that includes information about attitudes, speed, altitude, and GPS coordinates. MONET is different from previous thermal drone datasets because it features multimodal data, including rural scenes captured with thermal cameras containing both person and vehicle targets, along with trajectory information and metadata. We assessed the difficulty of the dataset in terms of transfer learning between the two sites and evaluated nine object detection algorithms to identify the open challenges associated with this type of data. Project page: https://github.com/fabiopoiesi/monet_dataset.