 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolution of Collective Behaviors for a Real Swarm of Aquatic Surface Robots
Feb 02, 2016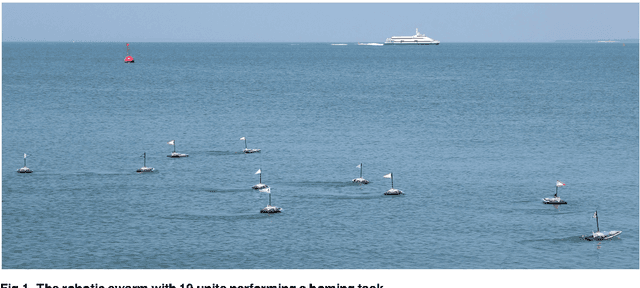

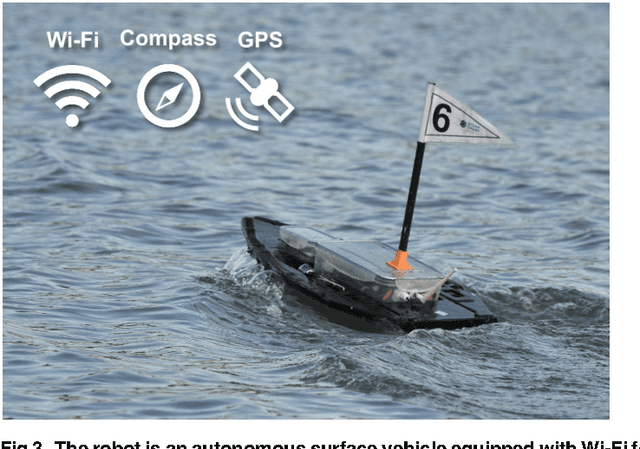
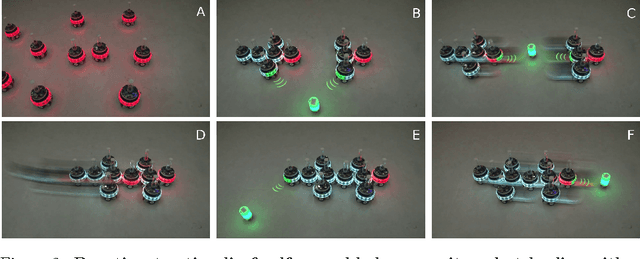
Swarm robotics is a promising approach for the coordination of large numbers of robots. While previous studies have shown that evolutionary robotics techniques can be applied to obtain robust and efficient self-organized behaviors for robot swarms, most studies have been conducted in simulation, and the few that have been conducted on real robots have been confined to laboratory environments. In this paper, we demonstrate for the first time a swarm robotics system with evolved control successfully operating in a real and uncontrolled environment. We evolve neural network-based controllers in simulation for canonical swarm robotics tasks, namely homing, dispersion, clustering, and monitoring. We then assess the performance of the controllers on a real swarm of up to ten aquatic surface robots. Our results show that the evolved controllers transfer successfully to real robots and achieve a performance similar to the performance obtained in simulation. We validate that the evolved controllers display key properties of swarm intelligence-based control, namely scalability, flexibility, and robustness on the real swarm. We conclude with a proof-of-concept experiment in which the swarm performs a complete environmental monitoring task by combining multiple evolved controllers.
* 31 pages, 15 figures, journal
Virtual Nervous Systems for Self-Assembling Robots - A preliminary report
May 26, 2015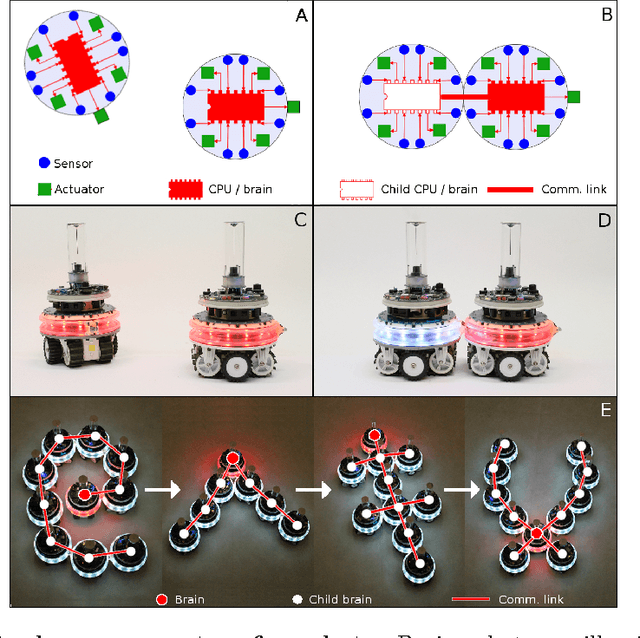
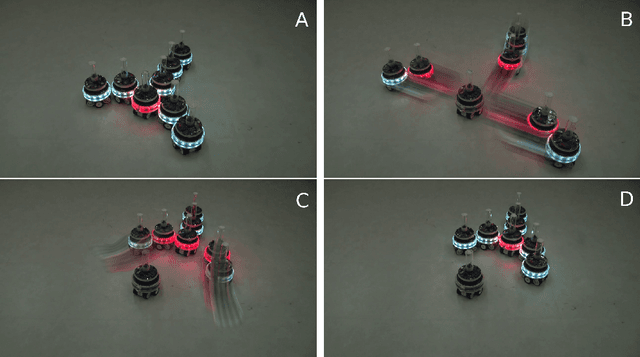
We define the nervous system of a robot as the processing unit responsible for controlling the robot body, together with the links between the processing unit and the sensorimotor hardware of the robot - i.e., the equivalent of the central nervous system in biological organisms. We present autonomous robots that can merge their nervous systems when they physically connect to each other, creating a "virtual nervous system" (VNS). We show that robots with a VNS have capabilities beyond those found in any existing robotic system or biological organism: they can merge into larger bodies with a single brain (i.e., processing unit), split into separate bodies with independent brains, and temporarily acquire sensing and actuating capabilities of specialized peer robots. VNS-based robots can also self-heal by removing or replacing malfunctioning body parts, including the brain.
Systematic Derivation of Behaviour Characterisations in Evolutionary Robotics
Jul 02, 2014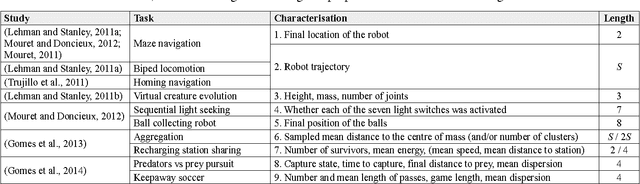
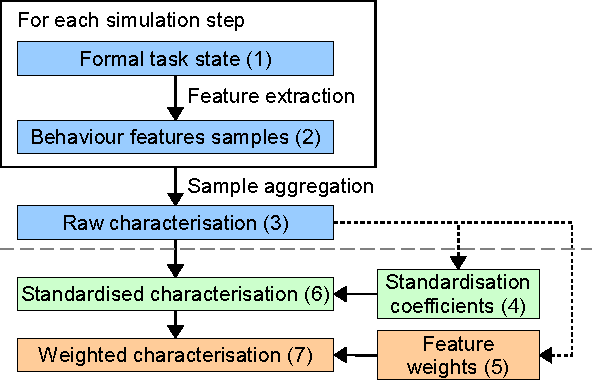
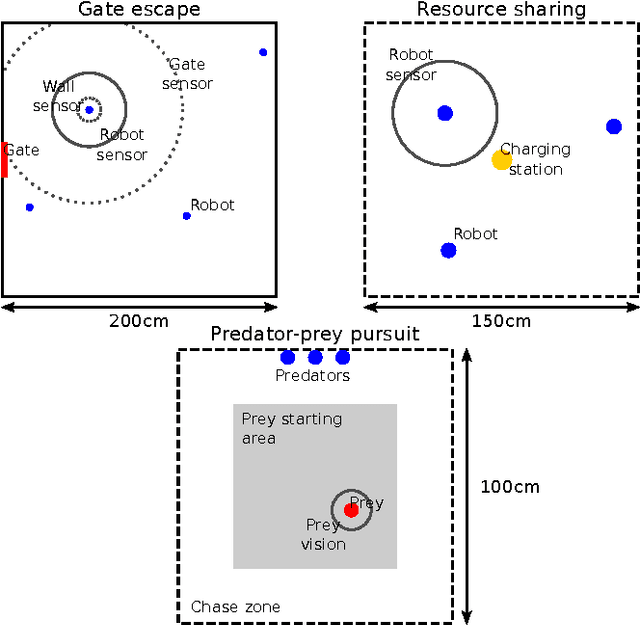
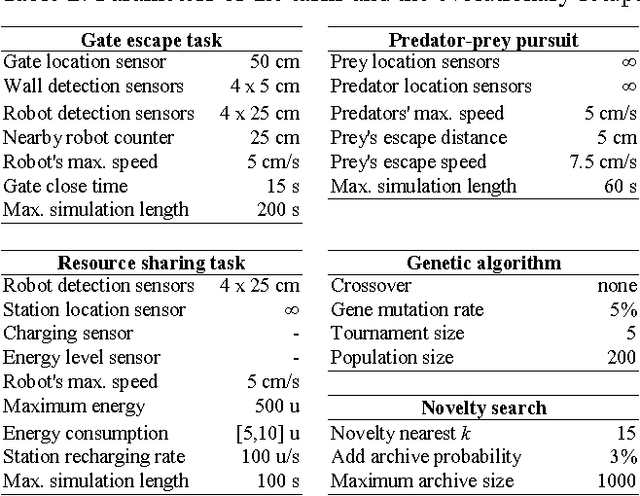
Evolutionary techniques driven by behavioural diversity, such as novelty search, have shown significant potential in evolutionary robotics. These techniques rely on priorly specified behaviour characterisations to estimate the similarity between individuals. Characterisations are typically defined in an ad hoc manner based on the experimenter's intuition and knowledge about the task. Alternatively, generic characterisations based on the sensor-effector values of the agents are used. In this paper, we propose a novel approach that allows for systematic derivation of behaviour characterisations for evolutionary robotics, based on a formal description of the agents and their environment. Systematically derived behaviour characterisations (SDBCs) go beyond generic characterisations in that they can contain task-specific features related to the internal state of the agents, environmental features, and relations between them. We evaluate SDBCs with novelty search in three simulated collective robotics tasks. Our results show that SDBCs yield a performance comparable to the task-specific characterisations, in terms of both solution quality and behaviour space exploration.
* To appear in 14th International Conference on the Synthesis and Simulation of Living Systems (ALife 14)
Novelty Search in Competitive Coevolution
Jul 02, 2014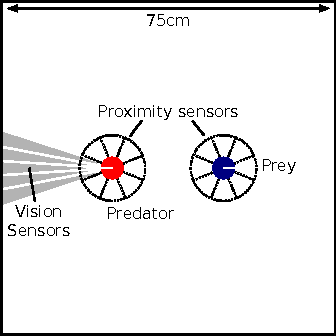
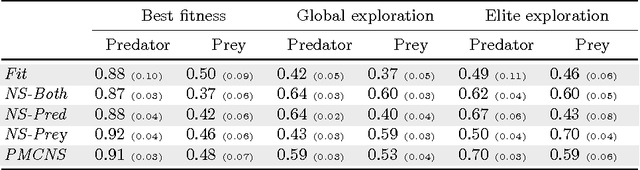
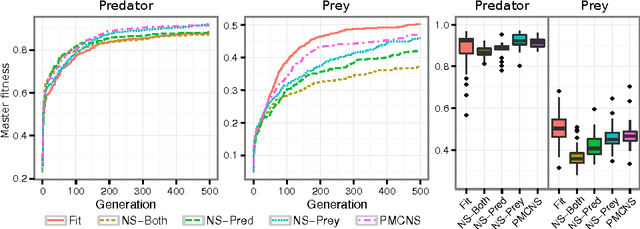
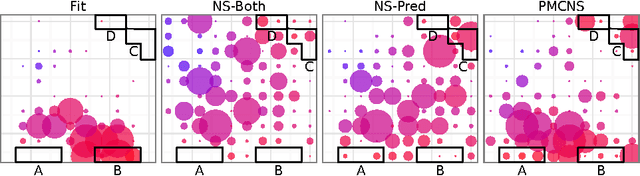
One of the main motivations for the use of competitive coevolution systems is their ability to capitalise on arms races between competing species to evolve increasingly sophisticated solutions. Such arms races can, however, be hard to sustain, and it has been shown that the competing species often converge prematurely to certain classes of behaviours. In this paper, we investigate if and how novelty search, an evolutionary technique driven by behavioural novelty, can overcome convergence in coevolution. We propose three methods for applying novelty search to coevolutionary systems with two species: (i) score both populations according to behavioural novelty; (ii) score one population according to novelty, and the other according to fitness; and (iii) score both populations with a combination of novelty and fitness. We evaluate the methods in a predator-prey pursuit task. Our results show that novelty-based approaches can evolve a significantly more diverse set of solutions, when compared to traditional fitness-based coevolution.
* To appear in 13th International Conference on Parallel Problem Solving from Nature (PPSN 2014)
Generic Behaviour Similarity Measures for Evolutionary Swarm Robotics
Apr 11, 2013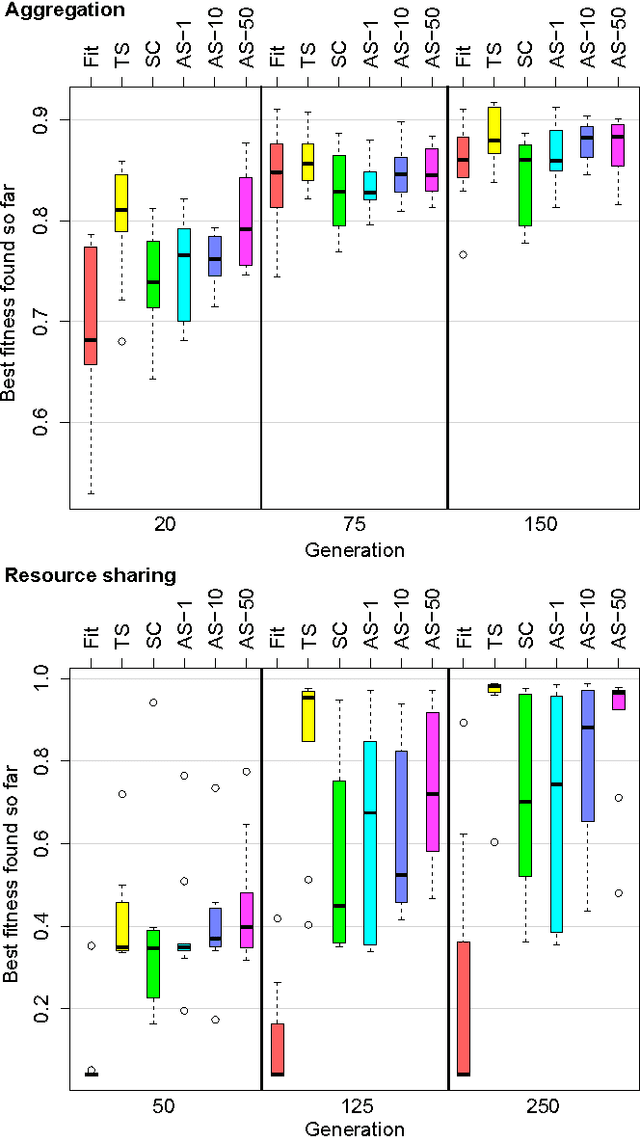
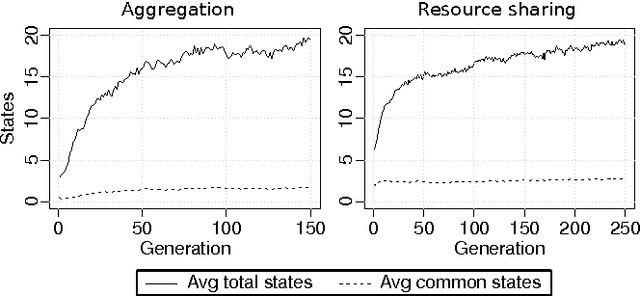
Novelty search has shown to be a promising approach for the evolution of controllers for swarm robotics. In existing studies, however, the experimenter had to craft a domain dependent behaviour similarity measure to use novelty search in swarm robotics applications. The reliance on hand-crafted similarity measures places an additional burden to the experimenter and introduces a bias in the evolutionary process. In this paper, we propose and compare two task-independent, generic behaviour similarity measures: combined state count and sampled average state. The proposed measures use the values of sensors and effectors recorded for each individual robot of the swarm. The characterisation of the group-level behaviour is then obtained by combining the sensor-effector values from all the robots. We evaluate the proposed measures in an aggregation task and in a resource sharing task. We show that the generic measures match the performance of domain dependent measures in terms of solution quality. Our results indicate that the proposed generic measures operate as effective behaviour similarity measures, and that it is possible to leverage the benefits of novelty search without having to craft domain specific similarity measures.
* Initial submission. Final version to appear in GECCO 2013 and dl.acm.org
Evolution of Swarm Robotics Systems with Novelty Search
Apr 11, 2013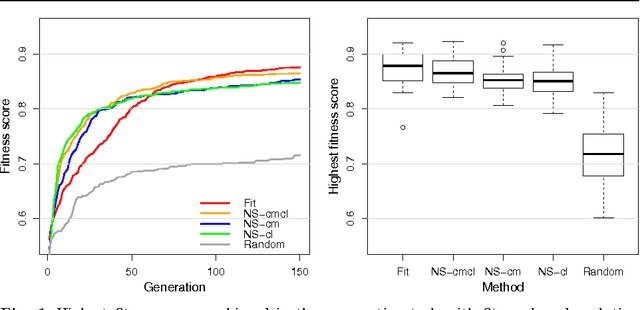
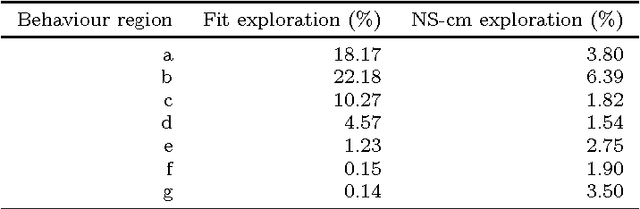
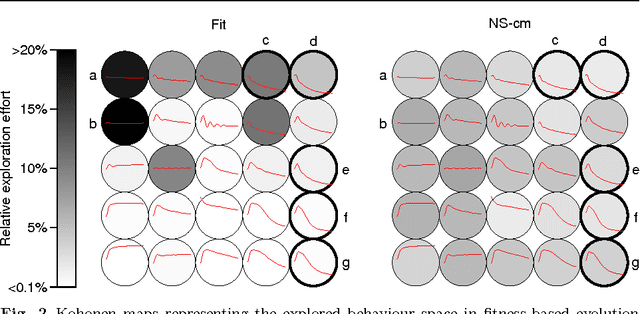

Novelty search is a recent artificial evolution technique that challenges traditional evolutionary approaches. In novelty search, solutions are rewarded based on their novelty, rather than their quality with respect to a predefined objective. The lack of a predefined objective precludes premature convergence caused by a deceptive fitness function. In this paper, we apply novelty search combined with NEAT to the evolution of neural controllers for homogeneous swarms of robots. Our empirical study is conducted in simulation, and we use a common swarm robotics task - aggregation, and a more challenging task - sharing of an energy recharging station. Our results show that novelty search is unaffected by deception, is notably effective in bootstrapping the evolution, can find solutions with lower complexity than fitness-based evolution, and can find a broad diversity of solutions for the same task. Even in non-deceptive setups, novelty search achieves solution qualities similar to those obtained in traditional fitness-based evolution. Our study also encompasses variants of novelty search that work in concert with fitness-based evolution to combine the exploratory character of novelty search with the exploitatory character of objective-based evolution. We show that these variants can further improve the performance of novelty search. Overall, our study shows that novelty search is a promising alternative for the evolution of controllers for robotic swarms.
* To appear in Swarm Intelligence (2013), ANTS Special Issue. The final publication will be available at link.springer.com