 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEncoder-Decoder Architectures for Clinically Relevant Coronary Artery Segmentation
Jun 21, 2021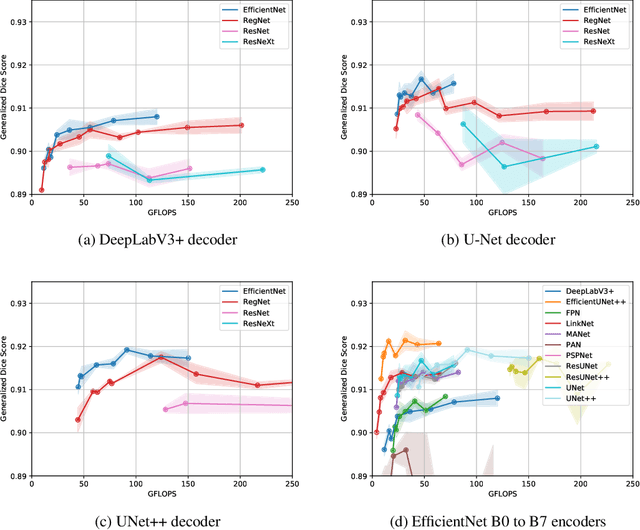
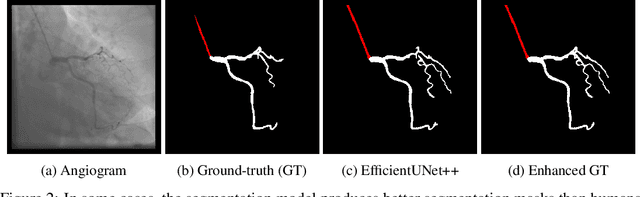

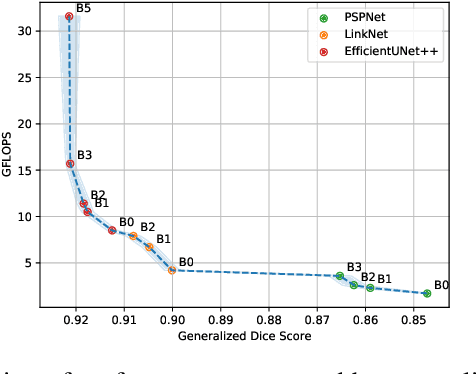
Coronary X-ray angiography is a crucial clinical procedure for the diagnosis and treatment of coronary artery disease, which accounts for roughly 16% of global deaths every year. However, the images acquired in these procedures have low resolution and poor contrast, making lesion detection and assessment challenging. Accurate coronary artery segmentation not only helps mitigate these problems, but also allows the extraction of relevant anatomical features for further analysis by quantitative methods. Although automated segmentation of coronary arteries has been proposed before, previous approaches have used non-optimal segmentation criteria, leading to less useful results. Most methods either segment only the major vessel, discarding important information from the remaining ones, or segment the whole coronary tree based mostly on contrast information, producing a noisy output that includes vessels that are not relevant for diagnosis. We adopt a better-suited clinical criterion and segment vessels according to their clinical relevance. Additionally, we simultaneously perform catheter segmentation, which may be useful for diagnosis due to the scale factor provided by the catheter's known diameter, and is a task that has not yet been performed with good results. To derive the optimal approach, we conducted an extensive comparative study of encoder-decoder architectures trained on a combination of focal loss and a variant of generalized dice loss. Based on the EfficientNet and the UNet++ architectures, we propose a line of efficient and high-performance segmentation models using a new decoder architecture, the EfficientUNet++, whose best-performing version achieved average dice scores of 0.8904 and 0.7526 for the artery and catheter classes, respectively, and an average generalized dice score of 0.9234.
Combating small molecule aggregation with machine learning
May 01, 2021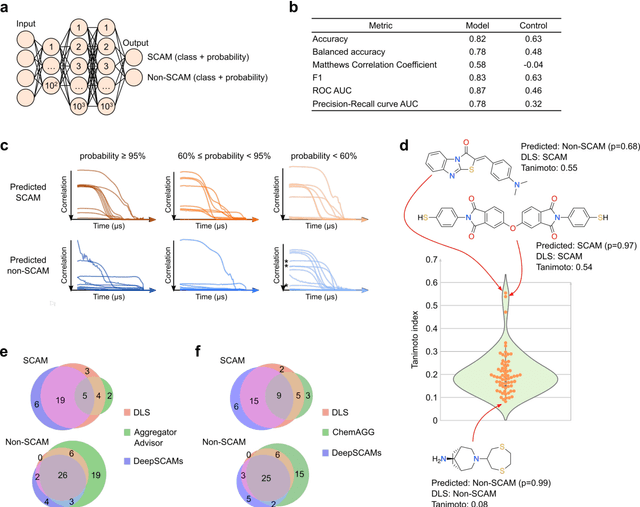
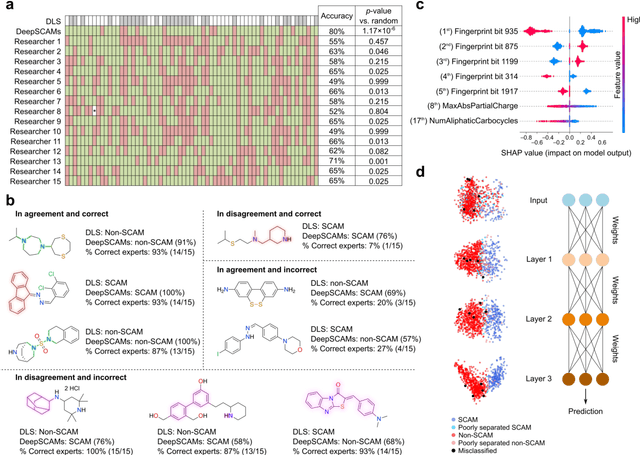
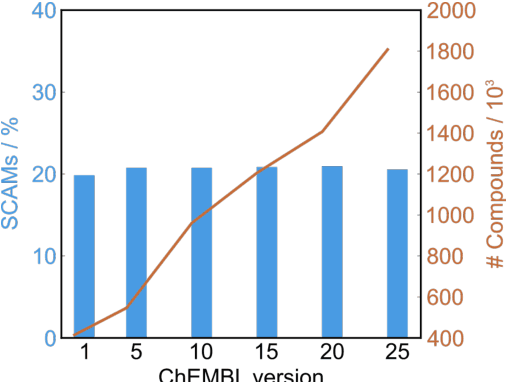
Biological screens are plagued by false positive hits resulting from aggregation. Thus, methods to triage small colloidally aggregating molecules (SCAMs) are in high demand. Herein, we disclose a bespoke machine-learning tool to confidently and intelligibly flag such entities. Our data demonstrate an unprecedented utility of machine learning for predicting SCAMs, achieving 80% of correct predictions in a challenging out-of-sample validation. The tool outperformed a panel of expert chemists, who correctly predicted 61 +/- 7% of the same test molecules in a Turing-like test. Further, the computational routine provided insight into molecular features governing aggregation that had remained hidden to expert intuition. Leveraging our tool, we quantify that up to 15-20% of ligands in publicly available chemogenomic databases have the high potential to aggregate at typical screening concentrations, imposing caution in systems biology and drug design programs. Our approach provides a means to augment human intuition, mitigate attrition and a pathway to accelerate future molecular medicine.
Evolution of Collective Behaviors for a Real Swarm of Aquatic Surface Robots
Feb 02, 2016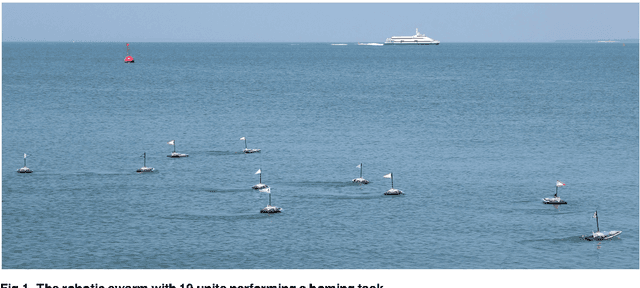

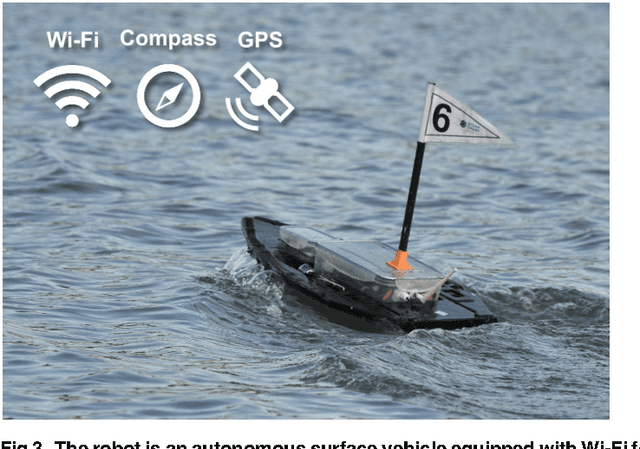
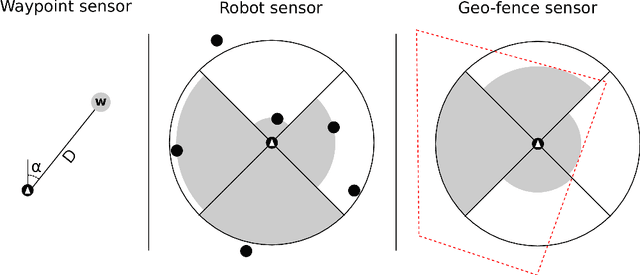
Swarm robotics is a promising approach for the coordination of large numbers of robots. While previous studies have shown that evolutionary robotics techniques can be applied to obtain robust and efficient self-organized behaviors for robot swarms, most studies have been conducted in simulation, and the few that have been conducted on real robots have been confined to laboratory environments. In this paper, we demonstrate for the first time a swarm robotics system with evolved control successfully operating in a real and uncontrolled environment. We evolve neural network-based controllers in simulation for canonical swarm robotics tasks, namely homing, dispersion, clustering, and monitoring. We then assess the performance of the controllers on a real swarm of up to ten aquatic surface robots. Our results show that the evolved controllers transfer successfully to real robots and achieve a performance similar to the performance obtained in simulation. We validate that the evolved controllers display key properties of swarm intelligence-based control, namely scalability, flexibility, and robustness on the real swarm. We conclude with a proof-of-concept experiment in which the swarm performs a complete environmental monitoring task by combining multiple evolved controllers.
* 31 pages, 15 figures, journal