 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystematic Derivation of Behaviour Characterisations in Evolutionary Robotics
Paper and Code
Jul 02, 2014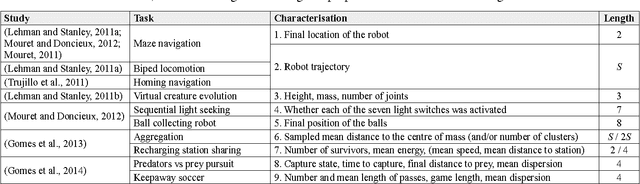
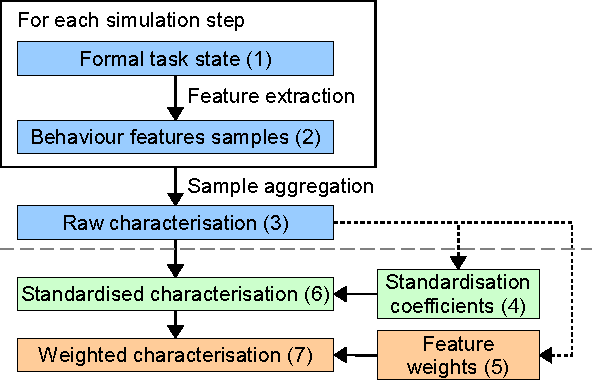
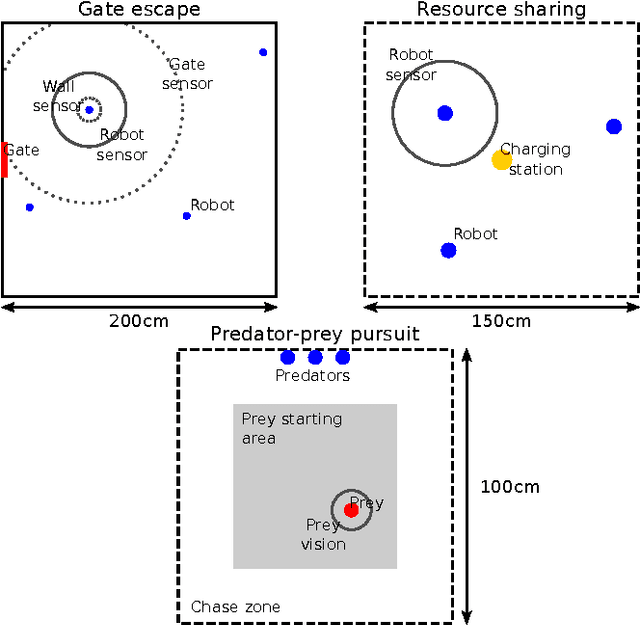
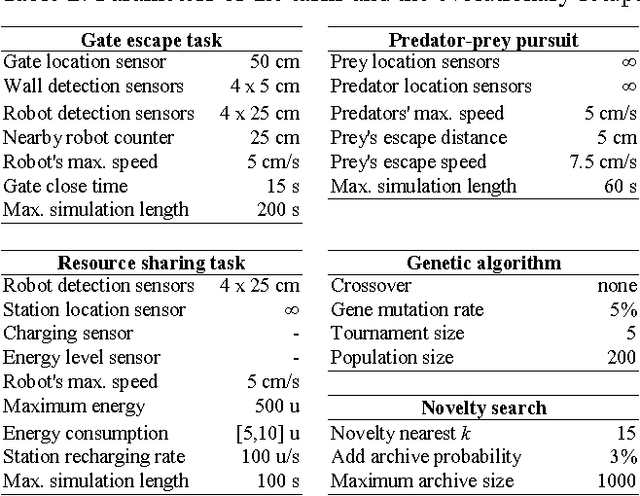
Evolutionary techniques driven by behavioural diversity, such as novelty search, have shown significant potential in evolutionary robotics. These techniques rely on priorly specified behaviour characterisations to estimate the similarity between individuals. Characterisations are typically defined in an ad hoc manner based on the experimenter's intuition and knowledge about the task. Alternatively, generic characterisations based on the sensor-effector values of the agents are used. In this paper, we propose a novel approach that allows for systematic derivation of behaviour characterisations for evolutionary robotics, based on a formal description of the agents and their environment. Systematically derived behaviour characterisations (SDBCs) go beyond generic characterisations in that they can contain task-specific features related to the internal state of the agents, environmental features, and relations between them. We evaluate SDBCs with novelty search in three simulated collective robotics tasks. Our results show that SDBCs yield a performance comparable to the task-specific characterisations, in terms of both solution quality and behaviour space exploration.