 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSystematic Derivation of Behaviour Characterisations in Evolutionary Robotics
Jul 02, 2014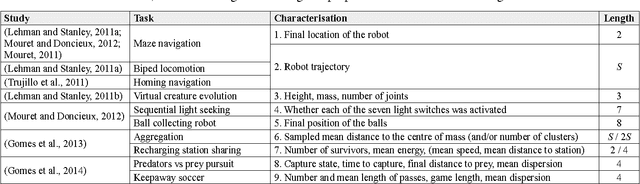
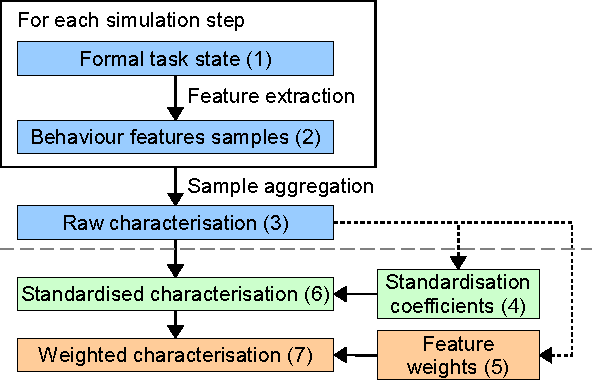
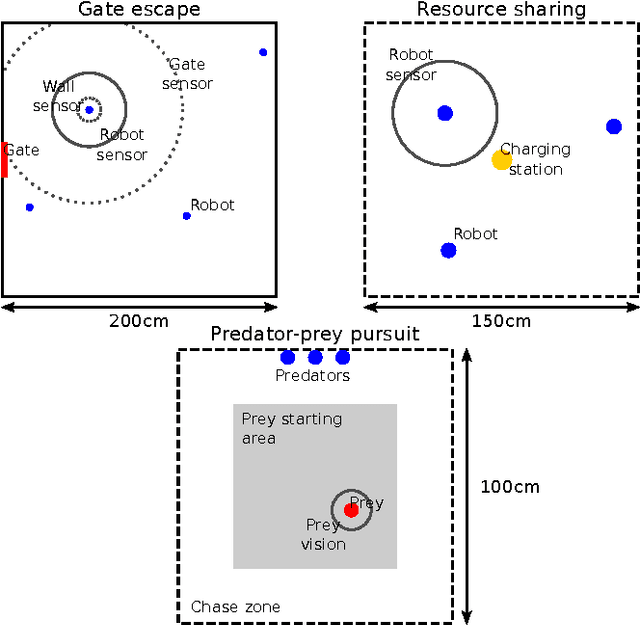
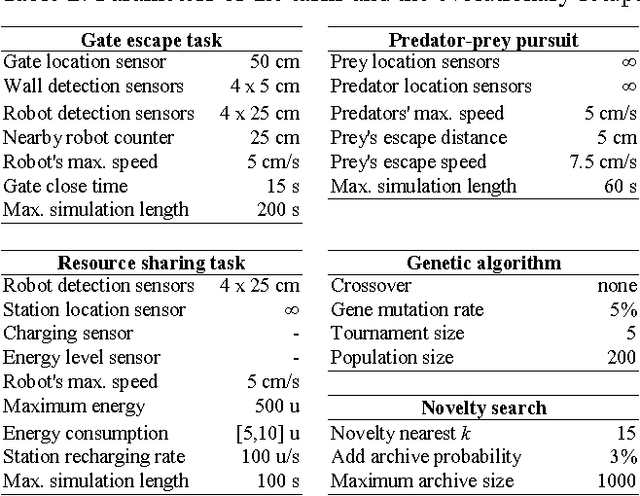
Evolutionary techniques driven by behavioural diversity, such as novelty search, have shown significant potential in evolutionary robotics. These techniques rely on priorly specified behaviour characterisations to estimate the similarity between individuals. Characterisations are typically defined in an ad hoc manner based on the experimenter's intuition and knowledge about the task. Alternatively, generic characterisations based on the sensor-effector values of the agents are used. In this paper, we propose a novel approach that allows for systematic derivation of behaviour characterisations for evolutionary robotics, based on a formal description of the agents and their environment. Systematically derived behaviour characterisations (SDBCs) go beyond generic characterisations in that they can contain task-specific features related to the internal state of the agents, environmental features, and relations between them. We evaluate SDBCs with novelty search in three simulated collective robotics tasks. Our results show that SDBCs yield a performance comparable to the task-specific characterisations, in terms of both solution quality and behaviour space exploration.
* To appear in 14th International Conference on the Synthesis and Simulation of Living Systems (ALife 14)
Novelty Search in Competitive Coevolution
Jul 02, 2014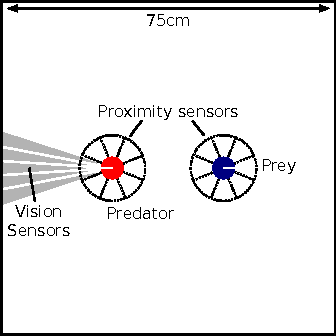
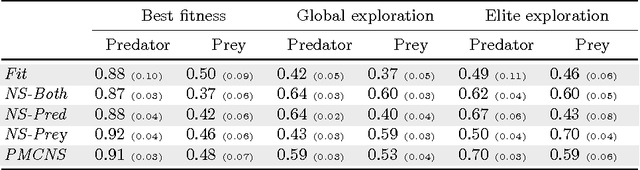
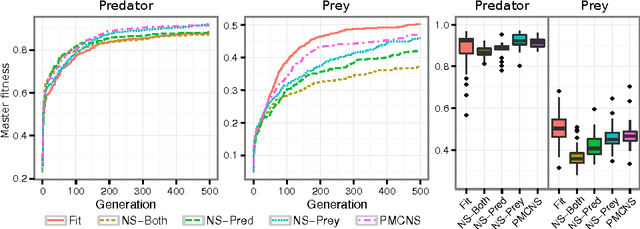
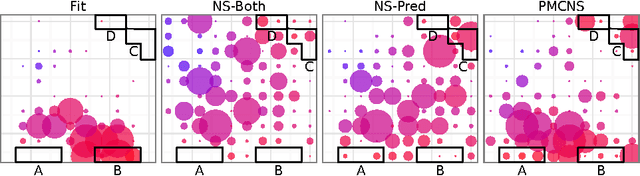
One of the main motivations for the use of competitive coevolution systems is their ability to capitalise on arms races between competing species to evolve increasingly sophisticated solutions. Such arms races can, however, be hard to sustain, and it has been shown that the competing species often converge prematurely to certain classes of behaviours. In this paper, we investigate if and how novelty search, an evolutionary technique driven by behavioural novelty, can overcome convergence in coevolution. We propose three methods for applying novelty search to coevolutionary systems with two species: (i) score both populations according to behavioural novelty; (ii) score one population according to novelty, and the other according to fitness; and (iii) score both populations with a combination of novelty and fitness. We evaluate the methods in a predator-prey pursuit task. Our results show that novelty-based approaches can evolve a significantly more diverse set of solutions, when compared to traditional fitness-based coevolution.
* To appear in 13th International Conference on Parallel Problem Solving from Nature (PPSN 2014)