 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneric Behaviour Similarity Measures for Evolutionary Swarm Robotics
Paper and Code
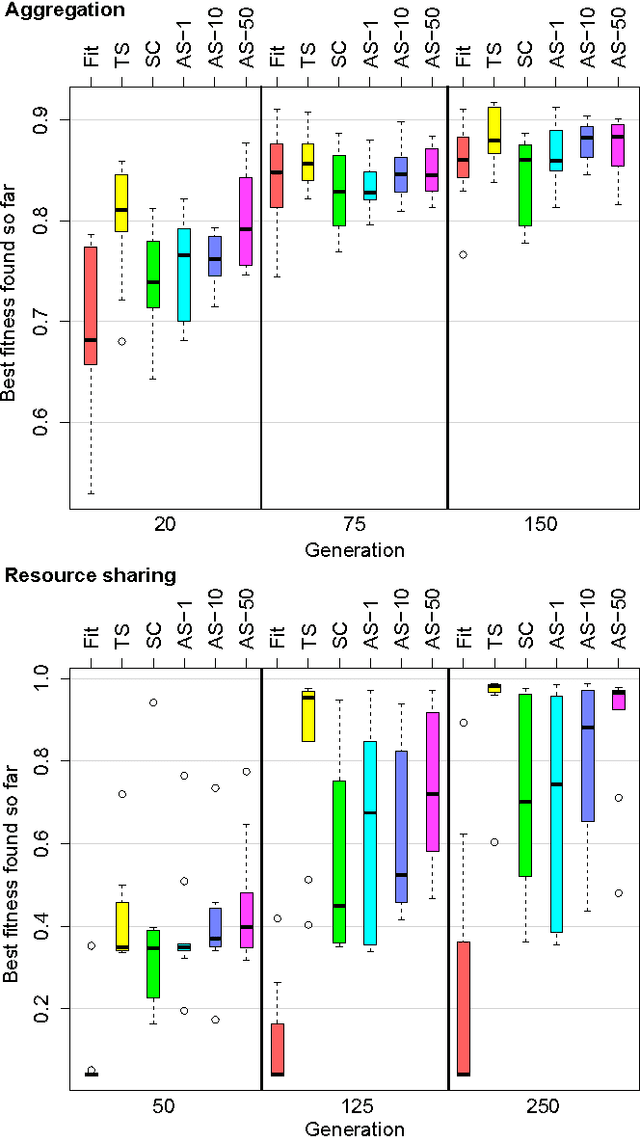
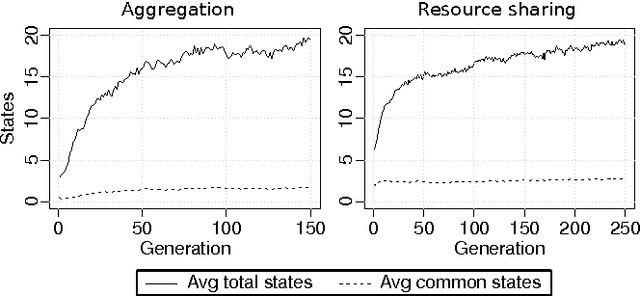
Novelty search has shown to be a promising approach for the evolution of controllers for swarm robotics. In existing studies, however, the experimenter had to craft a domain dependent behaviour similarity measure to use novelty search in swarm robotics applications. The reliance on hand-crafted similarity measures places an additional burden to the experimenter and introduces a bias in the evolutionary process. In this paper, we propose and compare two task-independent, generic behaviour similarity measures: combined state count and sampled average state. The proposed measures use the values of sensors and effectors recorded for each individual robot of the swarm. The characterisation of the group-level behaviour is then obtained by combining the sensor-effector values from all the robots. We evaluate the proposed measures in an aggregation task and in a resource sharing task. We show that the generic measures match the performance of domain dependent measures in terms of solution quality. Our results indicate that the proposed generic measures operate as effective behaviour similarity measures, and that it is possible to leverage the benefits of novelty search without having to craft domain specific similarity measures.