 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Validation of Textual Constraints Against AutomationML via LLMs and SHACL
Jun 12, 2025AutomationML (AML) enables standardized data exchange in engineering, yet existing recommendations for proper AML modeling are typically formulated as informal and textual constraints. These constraints cannot be validated automatically within AML itself. This work-in-progress paper introduces a pipeline to formalize and verify such constraints. First, AML models are mapped to OWL ontologies via RML and SPARQL. In addition, a Large Language Model translates textual rules into SHACL constraints, which are then validated against the previously generated AML ontology. Finally, SHACL validation results are automatically interpreted in natural language. The approach is demonstrated on a sample AML recommendation. Results show that even complex modeling rules can be semi-automatically checked -- without requiring users to understand formal methods or ontology technologies.
Beyond Formal Semantics for Capabilities and Skills: Model Context Protocol in Manufacturing
Jun 12, 2025Explicit modeling of capabilities and skills -- whether based on ontologies, Asset Administration Shells, or other technologies -- requires considerable manual effort and often results in representations that are not easily accessible to Large Language Models (LLMs). In this work-in-progress paper, we present an alternative approach based on the recently introduced Model Context Protocol (MCP). MCP allows systems to expose functionality through a standardized interface that is directly consumable by LLM-based agents. We conduct a prototypical evaluation on a laboratory-scale manufacturing system, where resource functions are made available via MCP. A general-purpose LLM is then tasked with planning and executing a multi-step process, including constraint handling and the invocation of resource functions via MCP. The results indicate that such an approach can enable flexible industrial automation without relying on explicit semantic models. This work lays the basis for further exploration of external tool integration in LLM-driven production systems.
Capability-Driven Skill Generation with LLMs: A RAG-Based Approach for Reusing Existing Libraries and Interfaces
May 06, 2025



Modern automation systems increasingly rely on modular architectures, with capabilities and skills as one solution approach. Capabilities define the functions of resources in a machine-readable form and skills provide the concrete implementations that realize those capabilities. However, the development of a skill implementation conforming to a corresponding capability remains a time-consuming and challenging task. In this paper, we present a method that treats capabilities as contracts for skill implementations and leverages large language models to generate executable code based on natural language user input. A key feature of our approach is the integration of existing software libraries and interface technologies, enabling the generation of skill implementations across different target languages. We introduce a framework that allows users to incorporate their own libraries and resource interfaces into the code generation process through a retrieval-augmented generation architecture. The proposed method is evaluated using an autonomous mobile robot controlled via Python and ROS 2, demonstrating the feasibility and flexibility of the approach.
Toward a Method to Generate Capability Ontologies from Natural Language Descriptions
Jun 12, 2024
To achieve a flexible and adaptable system, capability ontologies are increasingly leveraged to describe functions in a machine-interpretable way. However, modeling such complex ontological descriptions is still a manual and error-prone task that requires a significant amount of effort and ontology expertise. This contribution presents an innovative method to automate capability ontology modeling using Large Language Models (LLMs), which have proven to be well suited for such tasks. Our approach requires only a natural language description of a capability, which is then automatically inserted into a predefined prompt using a few-shot prompting technique. After prompting an LLM, the resulting capability ontology is automatically verified through various steps in a loop with the LLM to check the overall correctness of the capability ontology. First, a syntax check is performed, then a check for contradictions, and finally a check for hallucinations and missing ontology elements. Our method greatly reduces manual effort, as only the initial natural language description and a final human review and possible correction are necessary, thereby streamlining the capability ontology generation process.
On the Use of Large Language Models to Generate Capability Ontologies
Apr 29, 2024



Capability ontologies are increasingly used to model functionalities of systems or machines. The creation of such ontological models with all properties and constraints of capabilities is very complex and can only be done by ontology experts. However, Large Language Models (LLMs) have shown that they can generate machine-interpretable models from natural language text input and thus support engineers / ontology experts. Therefore, this paper investigates how LLMs can be used to create capability ontologies. We present a study with a series of experiments in which capabilities with varying complexities are generated using different prompting techniques and with different LLMs. Errors in the generated ontologies are recorded and compared. To analyze the quality of the generated ontologies, a semi-automated approach based on RDF syntax checking, OWL reasoning, and SHACL constraints is used. The results of this study are very promising because even for complex capabilities, the generated ontologies are almost free of errors.
Automated Process Planning Based on a Semantic Capability Model and SMT
Dec 14, 2023In research of manufacturing systems and autonomous robots, the term capability is used for a machine-interpretable specification of a system function. Approaches in this research area develop information models that capture all information relevant to interpret the requirements, effects and behavior of functions. These approaches are intended to overcome the heterogeneity resulting from the various types of processes and from the large number of different vendors. However, these models and associated methods do not offer solutions for automated process planning, i.e. finding a sequence of individual capabilities required to manufacture a certain product or to accomplish a mission using autonomous robots. Instead, this is a typical task for AI planning approaches, which unfortunately require a high effort to create the respective planning problem descriptions. In this paper, we present an approach that combines these two topics: Starting from a semantic capability model, an AI planning problem is automatically generated. The planning problem is encoded using Satisfiability Modulo Theories and uses an existing solver to find valid capability sequences including required parameter values. The approach also offers possibilities to integrate existing human expertise and to provide explanations for human operators in order to help understand planning decisions.
A Capability and Skill Model for Heterogeneous Autonomous Robots
Sep 22, 2022
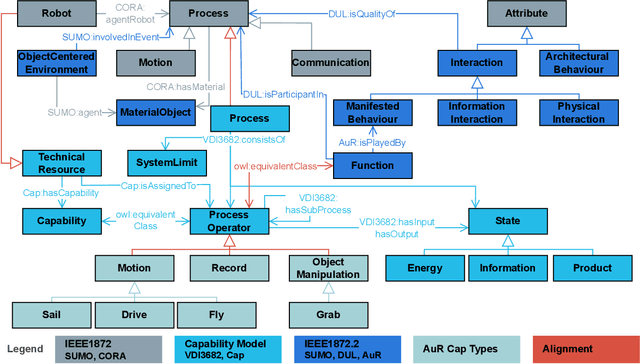
Teams of heterogeneous autonomous robots become increasingly important due to their facilitation of various complex tasks. For such heterogeneous robots, there is currently no consistent way of describing the functions that each robot provides. In the field of manufacturing, capability modeling is considered a promising approach to semantically model functions provided by different machines. This contribution investigates how to apply and extend capability models from manufacturing to the field of autonomous robots and presents an approach for such a capability model.
A Reference Model for Common Understanding of Capabilities and Skills in Manufacturing
Sep 15, 2022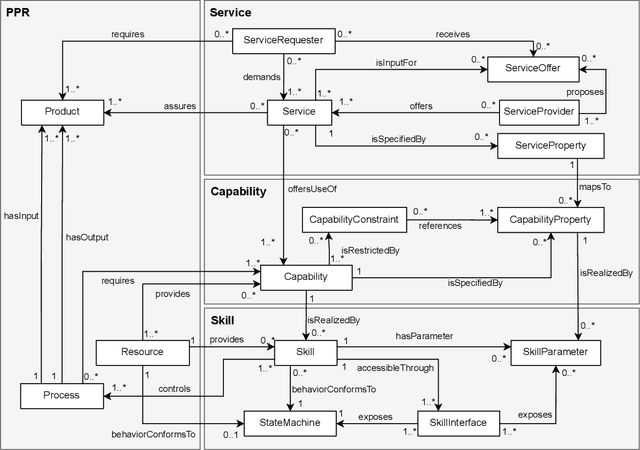
In manufacturing, many use cases of Industry 4.0 require vendor-neutral and machine-readable information models to describe, implement and execute resource functions. Such models have been researched under the terms capabilities and skills. Standardization of such models is required, but currently not available. This paper presents a reference model developed jointly by members of various organizations in a working group of the Plattform Industrie 4.0. This model covers definitions of most important aspects of capabilities and skills. It can be seen as a basis for further standardization efforts.
Toward a Generic Mapping Language for Transformations between RDF and Data Interchange Formats
Jul 21, 2022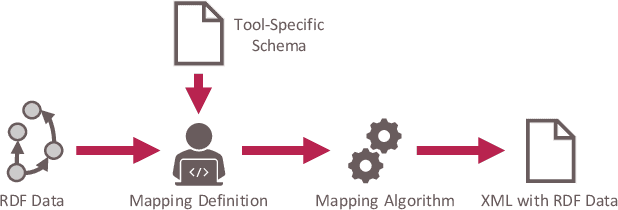

While there exist approaches to integrate heterogeneous data using semantic models, such semantic models can typically not be used by existing software tools. Many software tools - especially in engineering - only have options to import and export data in more established data interchange formats such as XML or JSON. Thus, if an information which is included in a semantic model needs to be used in a such a software tool, automatic approaches for mapping semantic information into an interchange format are needed. We aim to develop a generic mapping approach that allows users to create transformations of semantic information into a data interchange format with an arbitrary structure which can be defined by a user. This mapping approach is currently being elaborated. In this contribution, we report our initial steps targeted to transformations from RDF into XML. At first, a mapping language is introduced which allows to define automated mappings from ontologies to XML. Furthermore, a mapping algorithm capable of executing mappings defined in this language is presented. An evaluation is done with a use case in which engineering information needs to be used in a 3D modeling tool.
Capabilities and Skills in Manufacturing: A Survey Over the Last Decade of ETFA
Apr 26, 2022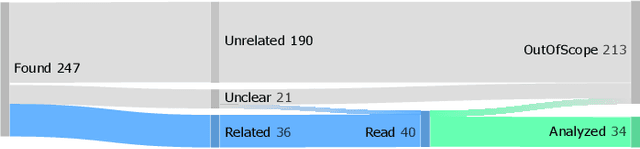
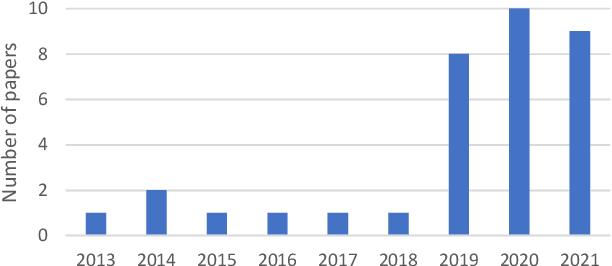
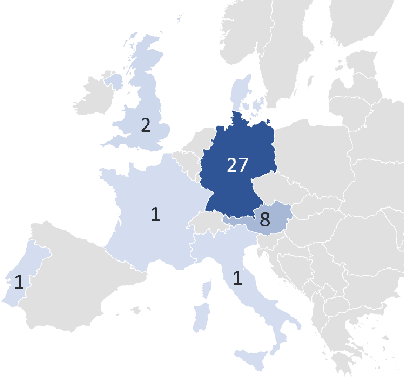
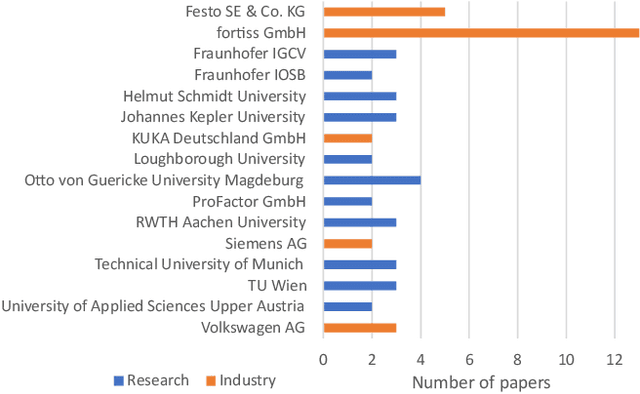
Industry 4.0 envisions Cyber-Physical Production Systems (CPPSs) to foster adaptive production of mass-customizable products. Manufacturing approaches based on capabilities and skills aim to support this adaptability by encapsulating machine functions and decoupling them from specific production processes. At the 2022 IEEE conference on Emerging Technologies and Factory Automation (ETFA), a special session on capability- and skill-based manufacturing is hosted for the fourth time. However, an overview on capability- and skill based systems in factory automation and manufacturing systems is missing. This paper aims to provide such an overview and give insights to this particular field of research. We conducted a concise literature survey of papers covering the topics of capabilities and skills in manufacturing from the last ten years of the ETFA conference. We found 247 papers with a notion on capabilities and skills and identified and analyzed 34 relevant papers which met this survey's inclusion criteria. In this paper, we provide (i) an overview of the research field, (ii) an analysis of the characteristics of capabilities and skills, and (iii) a discussion on gaps and opportunities.