 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Sense of Touch: Unsupervised Shapelet Learning in Bag-of-words Sense
Feb 06, 2025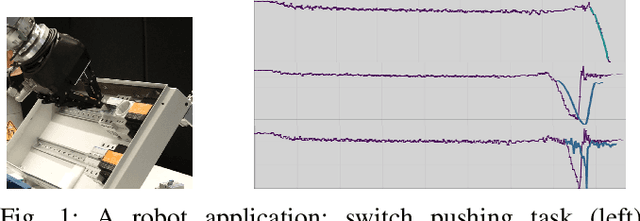
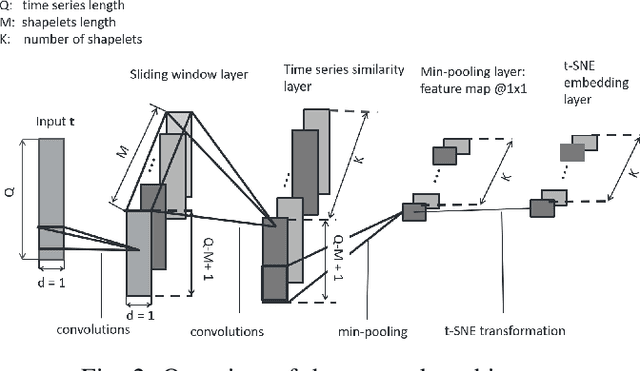
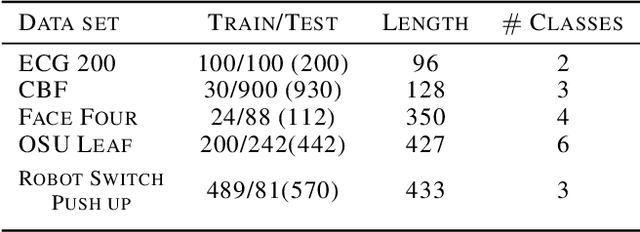
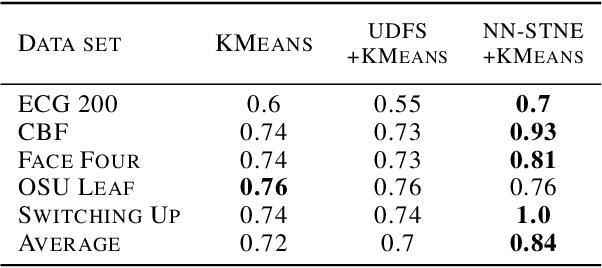
This paper introduces NN-STNE, a neural network using t-distributed stochastic neighbor embedding (t-SNE) as a hidden layer to reduce input dimensions by mapping long time-series data into shapelet membership probabilities. A Gaussian kernel-based mean square error preserves local data structure, while K-means initializes shapelet candidates due to the non-convex optimization challenge. Unlike existing methods, our approach uses t-SNE to address crowding in low-dimensional space and applies L1-norm regularization to optimize shapelet length. Evaluations on the UCR dataset and an electrical component manipulation task, like switching on, demonstrate improved clustering accuracy over state-of-the-art feature-learning methods in robotics.
A Reference Model for Common Understanding of Capabilities and Skills in Manufacturing
Sep 15, 2022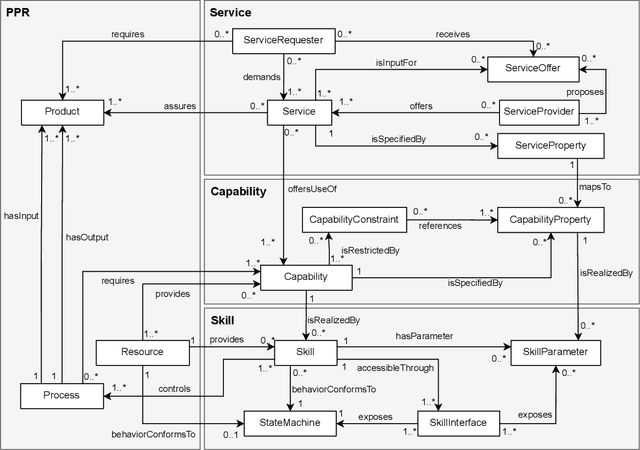
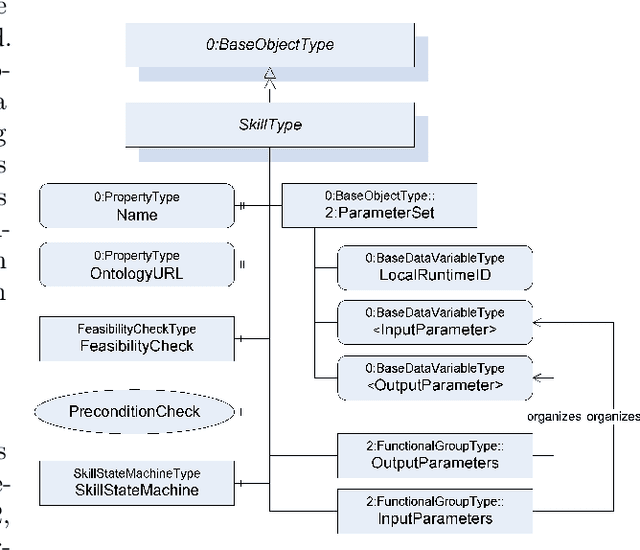
In manufacturing, many use cases of Industry 4.0 require vendor-neutral and machine-readable information models to describe, implement and execute resource functions. Such models have been researched under the terms capabilities and skills. Standardization of such models is required, but currently not available. This paper presents a reference model developed jointly by members of various organizations in a working group of the Plattform Industrie 4.0. This model covers definitions of most important aspects of capabilities and skills. It can be seen as a basis for further standardization efforts.
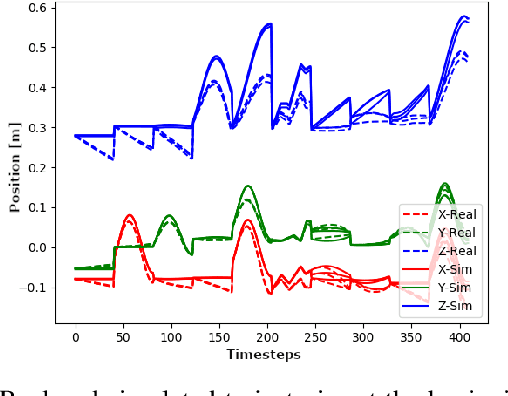
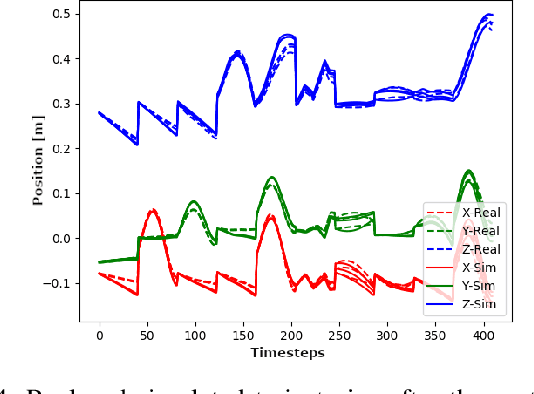
Sim2Real Transfer for Reinforcement Learning without Dynamics Randomization
Feb 19, 2020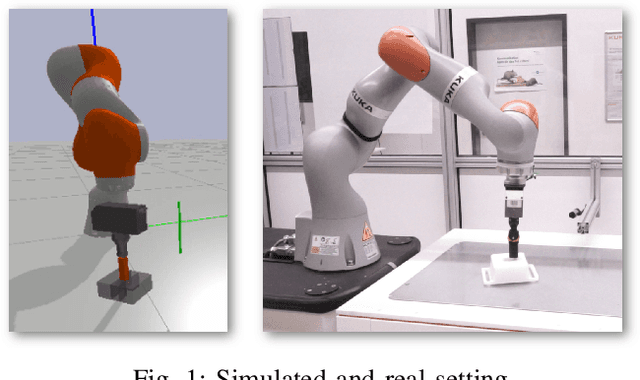
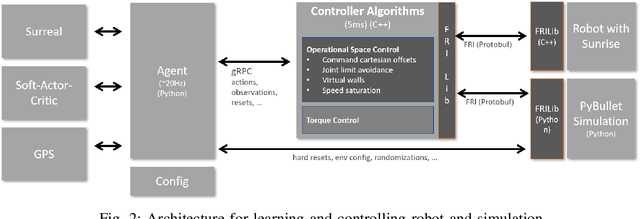
In this work we show how to use the Operational Space Control framework (OSC) under joint and cartesian constraints for reinforcement learning in cartesian space. Our method is therefore able to learn fast and with adjustable degrees of freedom, while we are able to transfer policies without additional dynamics randomizations on a KUKA LBR iiwa peg in-hole task. Before learning in simulation starts, we perform a system identification for aligning the simulation environment as far as possible with the dynamics of a real robot. Adding constraints to the OSC controller allows us to learn in a safe way on the real robot or to learn a flexible, goal conditioned policy that can be easily transferred from simulation to the real robot.