 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Formal Semantics for Capabilities and Skills: Model Context Protocol in Manufacturing
Jun 12, 2025Explicit modeling of capabilities and skills -- whether based on ontologies, Asset Administration Shells, or other technologies -- requires considerable manual effort and often results in representations that are not easily accessible to Large Language Models (LLMs). In this work-in-progress paper, we present an alternative approach based on the recently introduced Model Context Protocol (MCP). MCP allows systems to expose functionality through a standardized interface that is directly consumable by LLM-based agents. We conduct a prototypical evaluation on a laboratory-scale manufacturing system, where resource functions are made available via MCP. A general-purpose LLM is then tasked with planning and executing a multi-step process, including constraint handling and the invocation of resource functions via MCP. The results indicate that such an approach can enable flexible industrial automation without relying on explicit semantic models. This work lays the basis for further exploration of external tool integration in LLM-driven production systems.
Capability-Driven Skill Generation with LLMs: A RAG-Based Approach for Reusing Existing Libraries and Interfaces
May 06, 2025



Modern automation systems increasingly rely on modular architectures, with capabilities and skills as one solution approach. Capabilities define the functions of resources in a machine-readable form and skills provide the concrete implementations that realize those capabilities. However, the development of a skill implementation conforming to a corresponding capability remains a time-consuming and challenging task. In this paper, we present a method that treats capabilities as contracts for skill implementations and leverages large language models to generate executable code based on natural language user input. A key feature of our approach is the integration of existing software libraries and interface technologies, enabling the generation of skill implementations across different target languages. We introduce a framework that allows users to incorporate their own libraries and resource interfaces into the code generation process through a retrieval-augmented generation architecture. The proposed method is evaluated using an autonomous mobile robot controlled via Python and ROS 2, demonstrating the feasibility and flexibility of the approach.
Prävention und Beseitigung von Fehlerursachen im Kontext von unbemannten Fahrzeugen
Jul 03, 2024Mobile robots, becoming increasingly autonomous, are capable of operating in diverse and unknown environments. This flexibility allows them to fulfill goals independently and adapting their actions dynamically without rigidly predefined control codes. However, their autonomous behavior complicates guaranteeing safety and reliability due to the limited influence of a human operator to accurately supervise and verify each robot's actions. To ensure autonomous mobile robot's safety and reliability, which are aspects of dependability, methods are needed both in the planning and execution of missions for autonomous mobile robots. In this article, a twofold approach is presented that ensures fault removal in the context of mission planning and fault prevention during mission execution for autonomous mobile robots. First, the approach consists of a concept based on formal verification applied during the planning phase of missions. Second, the approach consists of a rule-based concept applied during mission execution. A use case applying the approach is presented, discussing how the two concepts complement each other and what contribution they make to certain aspects of dependability. Unbemannte Fahrzeuge sind durch zunehmende Autonomie in der Lage in unterschiedlichen unbekannten Umgebungen zu operieren. Diese Flexibilit\"at erm\"oglicht es ihnen Ziele eigenst\"andig zu erf\"ullen und ihre Handlungen dynamisch anzupassen ohne starr vorgegebenen Steuerungscode. Allerdings erschwert ihr autonomes Verhalten die Gew\"ahrleistung von Sicherheit und Zuverl\"assigkeit, bzw. der Verl\"asslichkeit, da der Einfluss eines menschlichen Bedieners zur genauen \"Uberwachung und Verifizierung der Aktionen jedes Roboters begrenzt ist. Daher werden Methoden sowohl in der Planung als auch in der Ausf\"uhrung von Missionen f\"ur unbemannte Fahrzeuge ben\"otigt, um die Sicherheit und Zuverl\"assigkeit dieser Fahrzeuge zu gew\"ahrleisten. In diesem Artikel wird ein zweistufiger Ansatz vorgestellt, der eine Fehlerbeseitigung w\"ahrend der Missionsplanung und eine Fehlerpr\"avention w\"ahrend der Missionsausf\"uhrung f\"ur unbemannte Fahrzeuge sicherstellt. Die Fehlerbeseitigung basiert auf formaler Verifikation, die w\"ahrend der Planungsphase der Missionen angewendet wird. Die Fehlerpr\"avention basiert auf einem regelbasierten Konzept, das w\"ahrend der Missionsausf\"uhrung angewendet wird. Der Ansatz wird an einem Beispiel angewendet und es wird diskutiert, wie die beiden Konzepte sich erg\"anzen und welchen Beitrag sie zu verschiedenen Aspekten der Verl\"asslichkeit leisten.
Toward a Method to Generate Capability Ontologies from Natural Language Descriptions
Jun 12, 2024
To achieve a flexible and adaptable system, capability ontologies are increasingly leveraged to describe functions in a machine-interpretable way. However, modeling such complex ontological descriptions is still a manual and error-prone task that requires a significant amount of effort and ontology expertise. This contribution presents an innovative method to automate capability ontology modeling using Large Language Models (LLMs), which have proven to be well suited for such tasks. Our approach requires only a natural language description of a capability, which is then automatically inserted into a predefined prompt using a few-shot prompting technique. After prompting an LLM, the resulting capability ontology is automatically verified through various steps in a loop with the LLM to check the overall correctness of the capability ontology. First, a syntax check is performed, then a check for contradictions, and finally a check for hallucinations and missing ontology elements. Our method greatly reduces manual effort, as only the initial natural language description and a final human review and possible correction are necessary, thereby streamlining the capability ontology generation process.
On the Use of Large Language Models to Generate Capability Ontologies
Apr 29, 2024



Capability ontologies are increasingly used to model functionalities of systems or machines. The creation of such ontological models with all properties and constraints of capabilities is very complex and can only be done by ontology experts. However, Large Language Models (LLMs) have shown that they can generate machine-interpretable models from natural language text input and thus support engineers / ontology experts. Therefore, this paper investigates how LLMs can be used to create capability ontologies. We present a study with a series of experiments in which capabilities with varying complexities are generated using different prompting techniques and with different LLMs. Errors in the generated ontologies are recorded and compared. To analyze the quality of the generated ontologies, a semi-automated approach based on RDF syntax checking, OWL reasoning, and SHACL constraints is used. The results of this study are very promising because even for complex capabilities, the generated ontologies are almost free of errors.
Automated Process Planning Based on a Semantic Capability Model and SMT
Dec 14, 2023In research of manufacturing systems and autonomous robots, the term capability is used for a machine-interpretable specification of a system function. Approaches in this research area develop information models that capture all information relevant to interpret the requirements, effects and behavior of functions. These approaches are intended to overcome the heterogeneity resulting from the various types of processes and from the large number of different vendors. However, these models and associated methods do not offer solutions for automated process planning, i.e. finding a sequence of individual capabilities required to manufacture a certain product or to accomplish a mission using autonomous robots. Instead, this is a typical task for AI planning approaches, which unfortunately require a high effort to create the respective planning problem descriptions. In this paper, we present an approach that combines these two topics: Starting from a semantic capability model, an AI planning problem is automatically generated. The planning problem is encoded using Satisfiability Modulo Theories and uses an existing solver to find valid capability sequences including required parameter values. The approach also offers possibilities to integrate existing human expertise and to provide explanations for human operators in order to help understand planning decisions.
A Capability and Skill Model for Heterogeneous Autonomous Robots
Sep 22, 2022
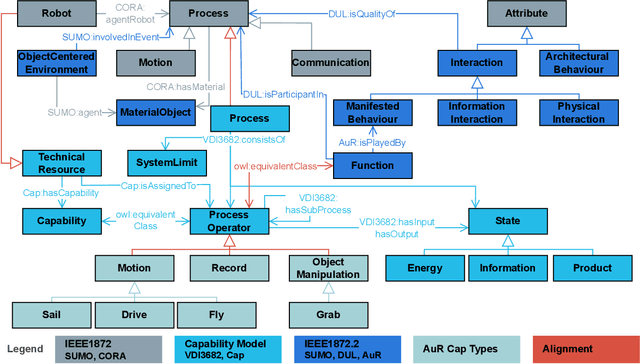
Teams of heterogeneous autonomous robots become increasingly important due to their facilitation of various complex tasks. For such heterogeneous robots, there is currently no consistent way of describing the functions that each robot provides. In the field of manufacturing, capability modeling is considered a promising approach to semantically model functions provided by different machines. This contribution investigates how to apply and extend capability models from manufacturing to the field of autonomous robots and presents an approach for such a capability model.