 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating AI Planning Semantics into SysML System Models for Automated PDDL File Generation
Jun 07, 2025This paper presents a SysML profile that enables the direct integration of planning semantics based on the Planning Domain Definition Language (PDDL) into system models. Reusable stereotypes are defined for key PDDL concepts such as types, predicates, functions and actions, while formal OCL constraints ensure syntactic consistency. The profile was derived from the Backus-Naur Form (BNF) definition of PDDL 3.1 to align with SysML modeling practices. A case study from aircraft manufacturing demonstrates the application of the profile: a robotic system with interchangeable end effectors is modeled and enriched to generate both domain and problem descriptions in PDDL format. These are used as input to a PDDL solver to derive optimized execution plans. The approach supports automated and model-based generation of planning descriptions and provides a reusable bridge between system modeling and AI planning in engineering design.
Capability-Driven Skill Generation with LLMs: A RAG-Based Approach for Reusing Existing Libraries and Interfaces
May 06, 2025



Modern automation systems increasingly rely on modular architectures, with capabilities and skills as one solution approach. Capabilities define the functions of resources in a machine-readable form and skills provide the concrete implementations that realize those capabilities. However, the development of a skill implementation conforming to a corresponding capability remains a time-consuming and challenging task. In this paper, we present a method that treats capabilities as contracts for skill implementations and leverages large language models to generate executable code based on natural language user input. A key feature of our approach is the integration of existing software libraries and interface technologies, enabling the generation of skill implementations across different target languages. We introduce a framework that allows users to incorporate their own libraries and resource interfaces into the code generation process through a retrieval-augmented generation architecture. The proposed method is evaluated using an autonomous mobile robot controlled via Python and ROS 2, demonstrating the feasibility and flexibility of the approach.
Automatic Mapping of AutomationML Files to Ontologies for Graph Queries and Validation
Apr 30, 2025



AutomationML has seen widespread adoption as an open data exchange format in the automation domain. It is an open and vendor neutral standard based on the extensible markup language XML. However, AutomationML extends XML with additional semantics, that limit the applicability of common XML-tools for applications like querying or data validation. This article provides practitioners with 1) an up-to-date ontology of the concepts in the AutomationML-standard, as well as 2) a declarative mapping to automatically transform any AutomationML model into RDF triples. Together, these artifacts allow practitioners an easy integration of AutomationML information into industrial knowledge graphs. A study on examples from the automation domain concludes that transforming AutomationML to OWL opens up new powerful ways for querying and validation that are impossible without transformation.
Model-based Workflow for the Automated Generation of PDDL Descriptions
Aug 15, 2024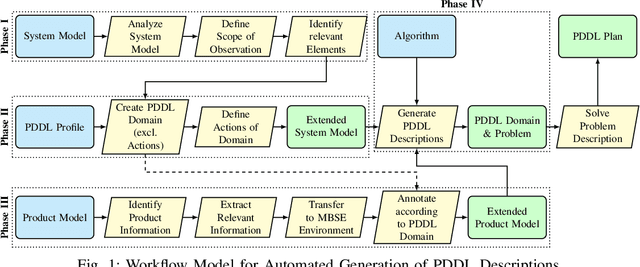
Manually creating Planning Domain Definition Language (PDDL) descriptions is difficult, error-prone, and requires extensive expert knowledge. However, this knowledge is already embedded in engineering models and can be reused. Therefore, this contribution presents a comprehensive workflow for the automated generation of PDDL descriptions from integrated system and product models. The proposed workflow leverages Model-Based Systems Engineering (MBSE) to organize and manage system and product information, translating it automatically into PDDL syntax for planning purposes. By connecting system and product models with planning aspects, it ensures that changes in these models are quickly reflected in updated PDDL descriptions, facilitating efficient and adaptable planning processes. The workflow is validated within a use case from aircraft assembly.
Chatbot-Based Ontology Interaction Using Large Language Models and Domain-Specific Standards
Jul 22, 2024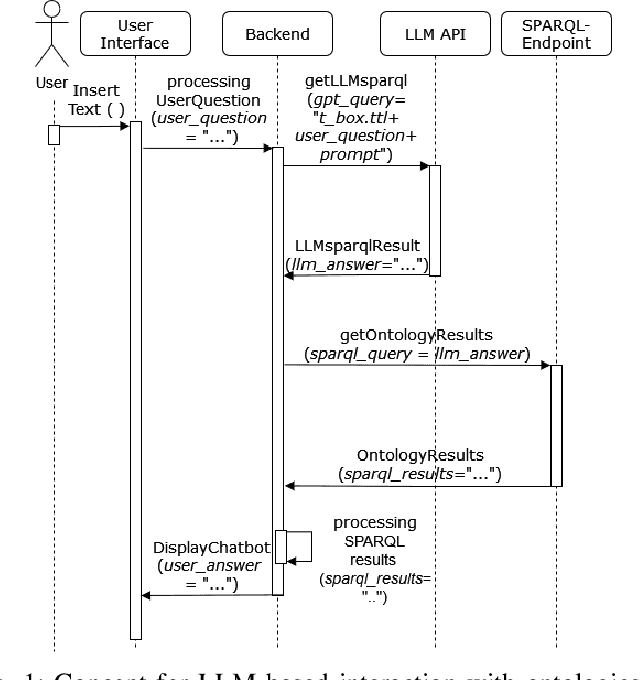
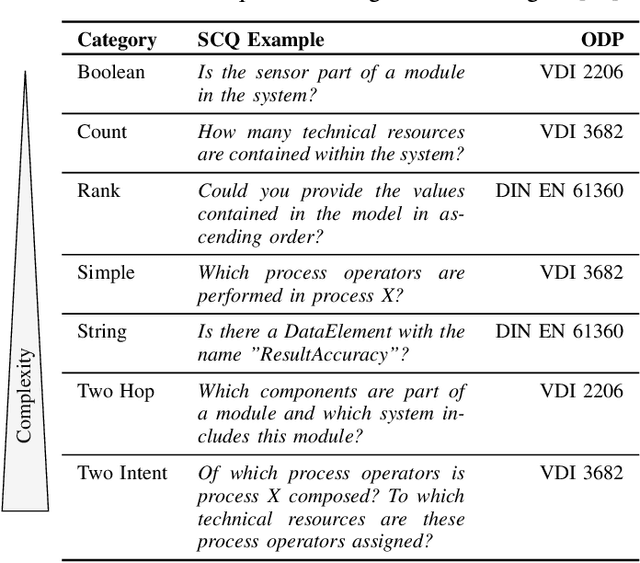
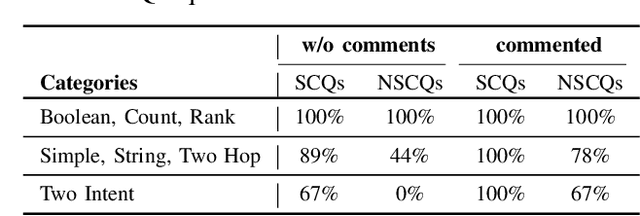
The following contribution introduces a concept that employs Large Language Models (LLMs) and a chatbot interface to enhance SPARQL query generation for ontologies, thereby facilitating intuitive access to formalized knowledge. Utilizing natural language inputs, the system converts user inquiries into accurate SPARQL queries that strictly query the factual content of the ontology, effectively preventing misinformation or fabrication by the LLM. To enhance the quality and precision of outcomes, additional textual information from established domain-specific standards is integrated into the ontology for precise descriptions of its concepts and relationships. An experimental study assesses the accuracy of generated SPARQL queries, revealing significant benefits of using LLMs for querying ontologies and highlighting areas for future research.
Integrating Ontology Design with the CRISP-DM in the context of Cyber-Physical Systems Maintenance
Jul 09, 2024



In the following contribution, a method is introduced that integrates domain expert-centric ontology design with the Cross-Industry Standard Process for Data Mining (CRISP-DM). This approach aims to efficiently build an application-specific ontology tailored to the corrective maintenance of Cyber-Physical Systems (CPS). The proposed method is divided into three phases. In phase one, ontology requirements are systematically specified, defining the relevant knowledge scope. Accordingly, CPS life cycle data is contextualized in phase two using domain-specific ontological artifacts. This formalized domain knowledge is then utilized in the CRISP-DM to efficiently extract new insights from the data. Finally, the newly developed data-driven model is employed to populate and expand the ontology. Thus, information extracted from this model is semantically annotated and aligned with the existing ontology in phase three. The applicability of this method has been evaluated in an anomaly detection case study for a modular process plant.
A Formal Model for Artificial Intelligence Applications in Automation Systems
Jul 03, 2024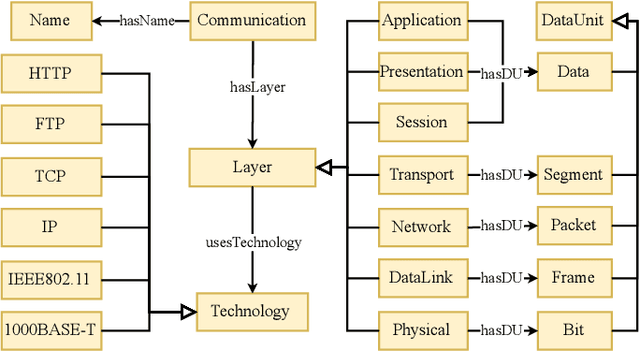
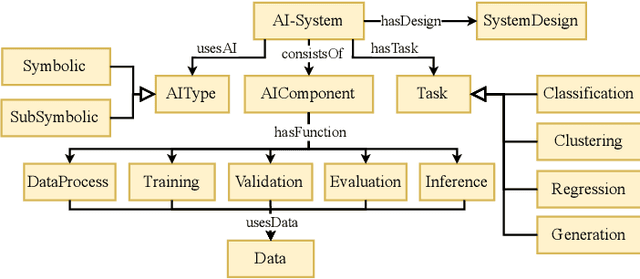
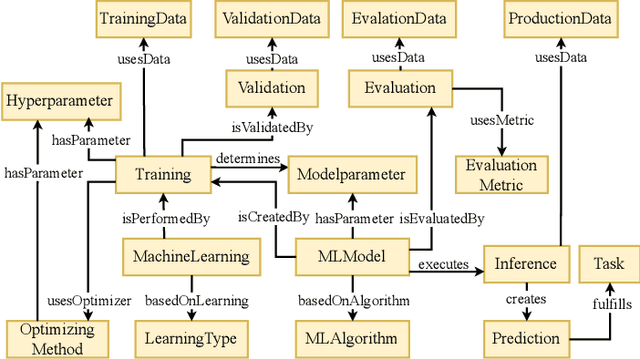
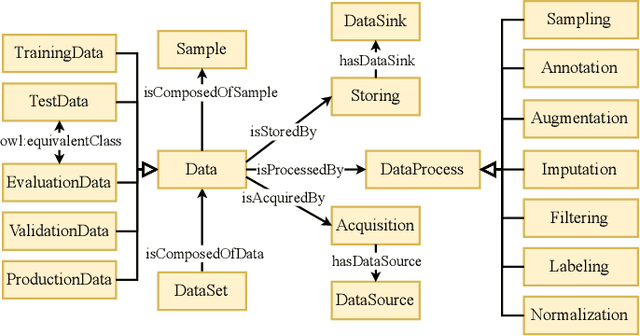
The integration of Artificial Intelligence (AI) into automation systems has the potential to enhance efficiency and to address currently unsolved existing technical challenges. However, the industry-wide adoption of AI is hindered by the lack of standardized documentation for the complex compositions of automation systems, AI software, production hardware, and their interdependencies. This paper proposes a formal model using standards and ontologies to provide clear and structured documentation of AI applications in automation systems. The proposed information model for artificial intelligence in automation systems (AIAS) utilizes ontology design patterns to map and link various aspects of automation systems and AI software. Validated through a practical example, the model demonstrates its effectiveness in improving documentation practices and aiding the sustainable implementation of AI in industrial settings.
Prävention und Beseitigung von Fehlerursachen im Kontext von unbemannten Fahrzeugen
Jul 03, 2024Mobile robots, becoming increasingly autonomous, are capable of operating in diverse and unknown environments. This flexibility allows them to fulfill goals independently and adapting their actions dynamically without rigidly predefined control codes. However, their autonomous behavior complicates guaranteeing safety and reliability due to the limited influence of a human operator to accurately supervise and verify each robot's actions. To ensure autonomous mobile robot's safety and reliability, which are aspects of dependability, methods are needed both in the planning and execution of missions for autonomous mobile robots. In this article, a twofold approach is presented that ensures fault removal in the context of mission planning and fault prevention during mission execution for autonomous mobile robots. First, the approach consists of a concept based on formal verification applied during the planning phase of missions. Second, the approach consists of a rule-based concept applied during mission execution. A use case applying the approach is presented, discussing how the two concepts complement each other and what contribution they make to certain aspects of dependability. Unbemannte Fahrzeuge sind durch zunehmende Autonomie in der Lage in unterschiedlichen unbekannten Umgebungen zu operieren. Diese Flexibilit\"at erm\"oglicht es ihnen Ziele eigenst\"andig zu erf\"ullen und ihre Handlungen dynamisch anzupassen ohne starr vorgegebenen Steuerungscode. Allerdings erschwert ihr autonomes Verhalten die Gew\"ahrleistung von Sicherheit und Zuverl\"assigkeit, bzw. der Verl\"asslichkeit, da der Einfluss eines menschlichen Bedieners zur genauen \"Uberwachung und Verifizierung der Aktionen jedes Roboters begrenzt ist. Daher werden Methoden sowohl in der Planung als auch in der Ausf\"uhrung von Missionen f\"ur unbemannte Fahrzeuge ben\"otigt, um die Sicherheit und Zuverl\"assigkeit dieser Fahrzeuge zu gew\"ahrleisten. In diesem Artikel wird ein zweistufiger Ansatz vorgestellt, der eine Fehlerbeseitigung w\"ahrend der Missionsplanung und eine Fehlerpr\"avention w\"ahrend der Missionsausf\"uhrung f\"ur unbemannte Fahrzeuge sicherstellt. Die Fehlerbeseitigung basiert auf formaler Verifikation, die w\"ahrend der Planungsphase der Missionen angewendet wird. Die Fehlerpr\"avention basiert auf einem regelbasierten Konzept, das w\"ahrend der Missionsausf\"uhrung angewendet wird. Der Ansatz wird an einem Beispiel angewendet und es wird diskutiert, wie die beiden Konzepte sich erg\"anzen und welchen Beitrag sie zu verschiedenen Aspekten der Verl\"asslichkeit leisten.
Toward a Method to Generate Capability Ontologies from Natural Language Descriptions
Jun 12, 2024
To achieve a flexible and adaptable system, capability ontologies are increasingly leveraged to describe functions in a machine-interpretable way. However, modeling such complex ontological descriptions is still a manual and error-prone task that requires a significant amount of effort and ontology expertise. This contribution presents an innovative method to automate capability ontology modeling using Large Language Models (LLMs), which have proven to be well suited for such tasks. Our approach requires only a natural language description of a capability, which is then automatically inserted into a predefined prompt using a few-shot prompting technique. After prompting an LLM, the resulting capability ontology is automatically verified through various steps in a loop with the LLM to check the overall correctness of the capability ontology. First, a syntax check is performed, then a check for contradictions, and finally a check for hallucinations and missing ontology elements. Our method greatly reduces manual effort, as only the initial natural language description and a final human review and possible correction are necessary, thereby streamlining the capability ontology generation process.
On the Use of Large Language Models to Generate Capability Ontologies
Apr 29, 2024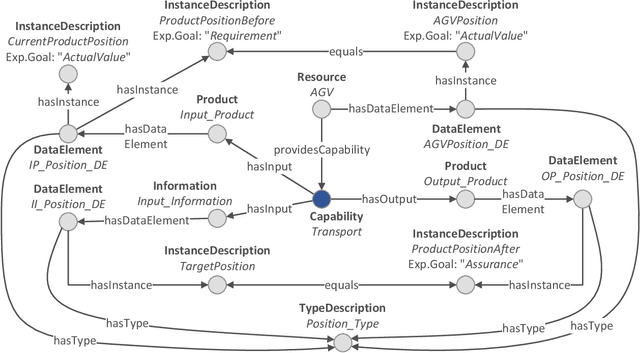



Capability ontologies are increasingly used to model functionalities of systems or machines. The creation of such ontological models with all properties and constraints of capabilities is very complex and can only be done by ontology experts. However, Large Language Models (LLMs) have shown that they can generate machine-interpretable models from natural language text input and thus support engineers / ontology experts. Therefore, this paper investigates how LLMs can be used to create capability ontologies. We present a study with a series of experiments in which capabilities with varying complexities are generated using different prompting techniques and with different LLMs. Errors in the generated ontologies are recorded and compared. To analyze the quality of the generated ontologies, a semi-automated approach based on RDF syntax checking, OWL reasoning, and SHACL constraints is used. The results of this study are very promising because even for complex capabilities, the generated ontologies are almost free of errors.