 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced Cyberattack Detection in Internet of Medical Things (IoMT) Using Convolutional Neural Networks
Oct 26, 2024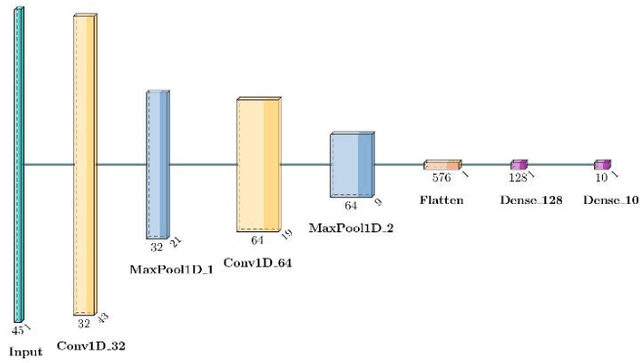
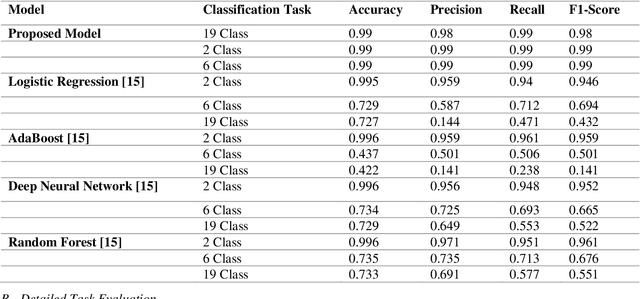
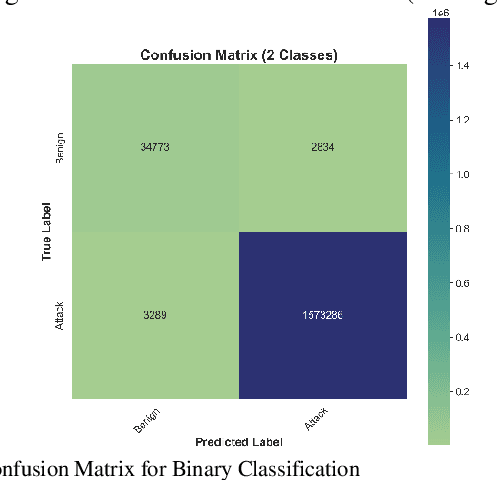
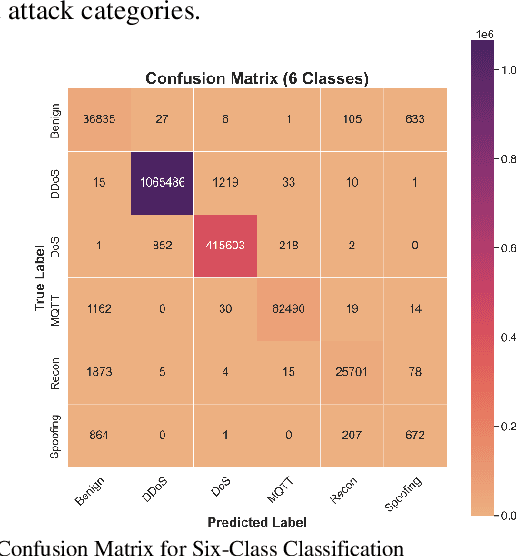
The increasing integration of the Internet of Medical Things (IoMT) into healthcare systems has significantly enhanced patient care but has also introduced critical cybersecurity challenges. This paper presents a novel approach based on Convolutional Neural Networks (CNNs) for detecting cyberattacks within IoMT environments. Unlike previous studies that predominantly utilized traditional machine learning (ML) models or simpler Deep Neural Networks (DNNs), the proposed model leverages the capabilities of CNNs to effectively analyze the temporal characteristics of network traffic data. Trained and evaluated on the CICIoMT2024 dataset, which comprises 18 distinct types of cyberattacks across a range of IoMT devices, the proposed CNN model demonstrates superior performance compared to previous state-of-the-art methods, achieving a perfect accuracy of 99% in binary, categorical, and multiclass classification tasks. This performance surpasses that of conventional ML models such as Logistic Regression, AdaBoost, DNNs, and Random Forests. These findings highlight the potential of CNNs to substantially improve IoMT cybersecurity, thereby ensuring the protection and integrity of connected healthcare systems.
Data-Driven Goal Recognition in Transhumeral Prostheses Using Process Mining Techniques
Sep 15, 2023A transhumeral prosthesis restores missing anatomical segments below the shoulder, including the hand. Active prostheses utilize real-valued, continuous sensor data to recognize patient target poses, or goals, and proactively move the artificial limb. Previous studies have examined how well the data collected in stationary poses, without considering the time steps, can help discriminate the goals. In this case study paper, we focus on using time series data from surface electromyography electrodes and kinematic sensors to sequentially recognize patients' goals. Our approach involves transforming the data into discrete events and training an existing process mining-based goal recognition system. Results from data collected in a virtual reality setting with ten subjects demonstrate the effectiveness of our proposed goal recognition approach, which achieves significantly better precision and recall than the state-of-the-art machine learning techniques and is less confident when wrong, which is beneficial when approximating smoother movements of prostheses.
Generation of Time-Varying Impedance Attacks Against Haptic Shared Control Steering Systems
Jul 07, 2023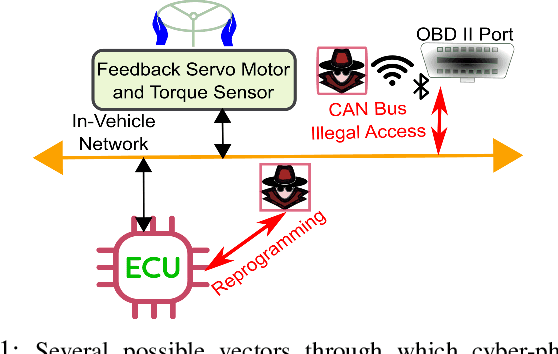


The safety-critical nature of vehicle steering is one of the main motivations for exploring the space of possible cyber-physical attacks against the steering systems of modern vehicles. This paper investigates the adversarial capabilities for destabilizing the interaction dynamics between human drivers and vehicle haptic shared control (HSC) steering systems. In contrast to the conventional robotics literature, where the main objective is to render the human-automation interaction dynamics stable by ensuring passivity, this paper takes the exact opposite route. In particular, to investigate the damaging capabilities of a successful cyber-physical attack, this paper demonstrates that an attacker who targets the HSC steering system can destabilize the interaction dynamics between the human driver and the vehicle HSC steering system through synthesis of time-varying impedance profiles. Specifically, it is shown that the adversary can utilize a properly designed non-passive and time-varying adversarial impedance target dynamics, which are fed with a linear combination of the human driver and the steering column torques. Using these target dynamics, it is possible for the adversary to generate in real-time a reference angular command for the driver input device and the directional control steering assembly of the vehicle. Furthermore, it is shown that the adversary can make the steering wheel and the vehicle steering column angular positions to follow the reference command generated by the time-varying impedance target dynamics using proper adaptive control strategies. Numerical simulations demonstrate the effectiveness of such time-varying impedance attacks, which result in a non-passive and inherently unstable interaction between the driver and the HSC steering system.
Vehicular Applications of Koopman Operator Theory -- A Survey
Mar 21, 2023Koopman operator theory has proven to be a promising approach to nonlinear system identification and global linearization. For nearly a century, there had been no efficient means of calculating the Koopman operator for applied engineering purposes. The introduction of a recent computationally efficient method in the context of fluid dynamics, which is based on the system dynamics decomposition to a set of normal modes in descending order, has overcome this long-lasting computational obstacle. The purely data-driven nature of Koopman operators holds the promise of capturing unknown and complex dynamics for reduced-order model generation and system identification, through which the rich machinery of linear control techniques can be utilized. Given the ongoing development of this research area and the many existing open problems in the fields of smart mobility and vehicle engineering, a survey of techniques and open challenges of applying Koopman operator theory to this vibrant area is warranted. This review focuses on the various solutions of the Koopman operator which have emerged in recent years, particularly those focusing on mobility applications, ranging from characterization and component-level control operations to vehicle performance and fleet management. Moreover, this comprehensive review of over 100 research papers highlights the breadth of ways Koopman operator theory has been applied to various vehicular applications with a detailed categorization of the applied Koopman operator-based algorithm type. Furthermore, this review paper discusses theoretical aspects of Koopman operator theory that have been largely neglected by the smart mobility and vehicle engineering community and yet have large potential for contributing to solving open problems in these areas.
* Following a fruitful discussion with Professor Igor Mezic, the authors are providing a more detailed account of the roots of the modern-day engineering applications of the Koopman Operator Theory in this arXiv version
Location-aware Beamforming for MIMO-enabled UAV Communications: An Unknown Input Observer Approach
Nov 20, 2021

Numerous communications and networking challenges prevent deploying unmanned aerial vehicles (UAVs) in extreme environments where the existing wireless technologies are mainly ground-focused; and, as a consequence, the air-to-air channel for UAVs is not fully covered. In this paper, a novel spatial estimation for beamforming is proposed to address UAV-based joint sensing and communications (JSC). The proposed spatial estimation algorithm relies on using a delay tolerant observer-based predictor, which can accurately predict the positions of the target UAVs in the presence of uncertainties due to factors such as wind gust. The solution, which uses discrete-time unknown input observers (UIOs), reduces the joint target detection and communication complication notably by operating on the same device and performs reliably in the presence of channel blockage and interference. The effectiveness of the proposed approach is demonstrated using simulation results.
Integral Line-of-Sight Path Following Control of Magnetic Helical Microswimmers Subject to Step-Out Frequencies
Apr 29, 2021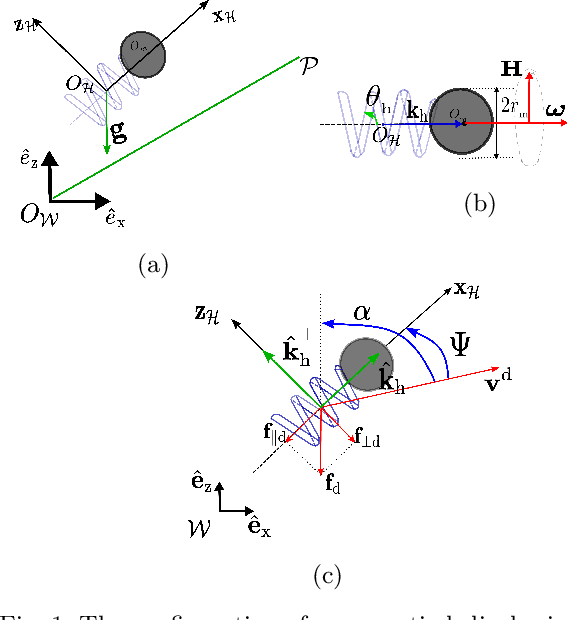
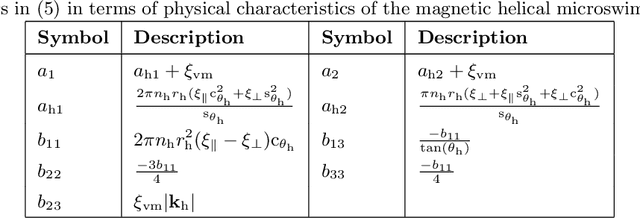
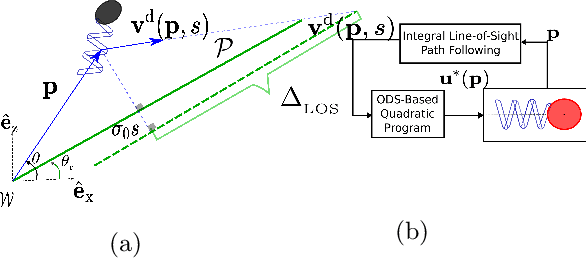
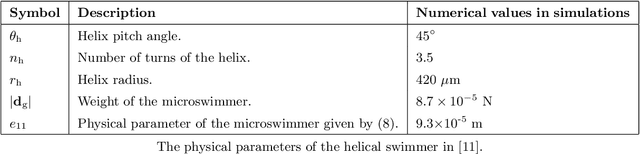
This paper investigates the problem of straight-line path following for magnetic helical microswimmers. The control objective is to make the helical microswimmer to converge to a straight line without violating the step-out frequency constraint. The proposed feedback control solution is based on an optimal decision strategy (ODS) that is cast as a trust-region subproblem (TRS), i.e., a quadratic program over a sphere. The ODS-based control strategy minimizes the difference between the microrobot velocity and an integral line-of-sight (ILOS)-based reference vector field while respecting the magnetic saturation constraints and ensuring the absolute continuity of the control input. Due to the embedded integral action in the reference vector field, the microswimmer will follow the desired straight line by compensating for the drift effect of the environmental disturbances as well as the microswimmer weight.
* Published in Automatica (March 2021)