 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShielded Reinforcement Learning Under Dynamic Temporal Logic Constraints
Mar 17, 2026Reinforcement Learning (RL) has shown promise in various robotics applications, yet its deployment on real systems is still limited due to safety and operational constraints. The safe RL field has gained considerable attention in recent years, which focuses on imposing safety constraints throughout the learning process. However, real systems often require more complex constraints than just safety, such as periodic recharging or time-bounded visits to specific regions. Imposing such spatio-temporal tasks during learning still remains a challenge. Signal Temporal Logic (STL) is a formal language for specifying temporal properties of real-valued signals and provides a way to express such complex tasks. In this paper, we propose a framework that leverages sequential control barrier functions and model-free RL to ensure that the given STL tasks are satisfied throughout the learning process. Our method extends beyond traditional safety constraints by enforcing rich STL specifications, which can involve visits to dynamic targets with unknown trajectories. We also demonstrate the effectiveness of our framework through various simulations.
Control Synthesis using Signal Temporal Logic Specifications with Integral and Derivative Predicates
Mar 26, 2021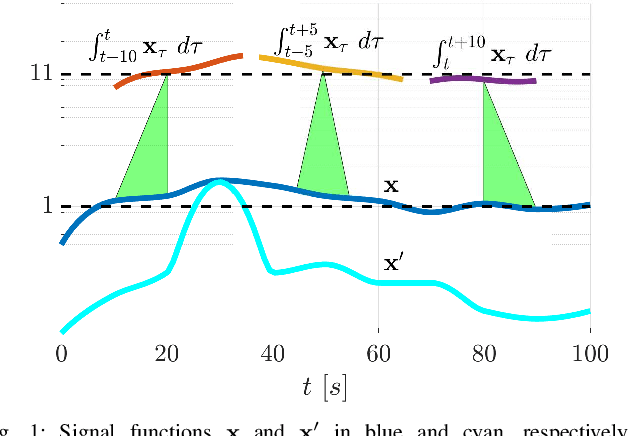
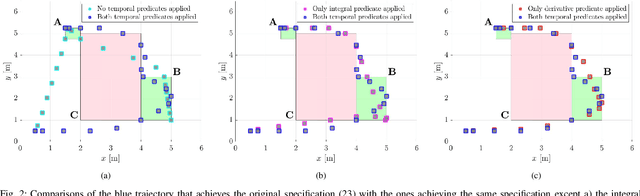

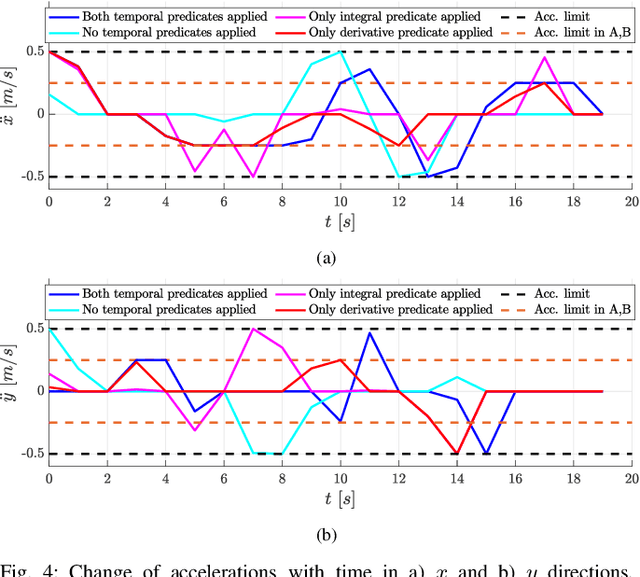
In many applications, the integrals and derivatives of signals carry valuable information (e.g., cumulative success over a time window, the rate of change) regarding the behavior of the underlying system. In this paper, we extend the expressiveness of Signal Temporal Logic (STL) by introducing predicates that can define rich properties related to the integral and derivative of a signal. For control synthesis, the new predicates are encoded into mixed-integer linear inequalities and are used in the formulation of a mixed-integer linear program to find a trajectory that satisfies an STL specification. We discuss the benefits of using the new predicates and illustrate them in a case study showing the influence of the new predicates on the trajectories of an autonomous robot.
Decentralized Safe Reactive Planning under TWTL Specifications
Jul 23, 2020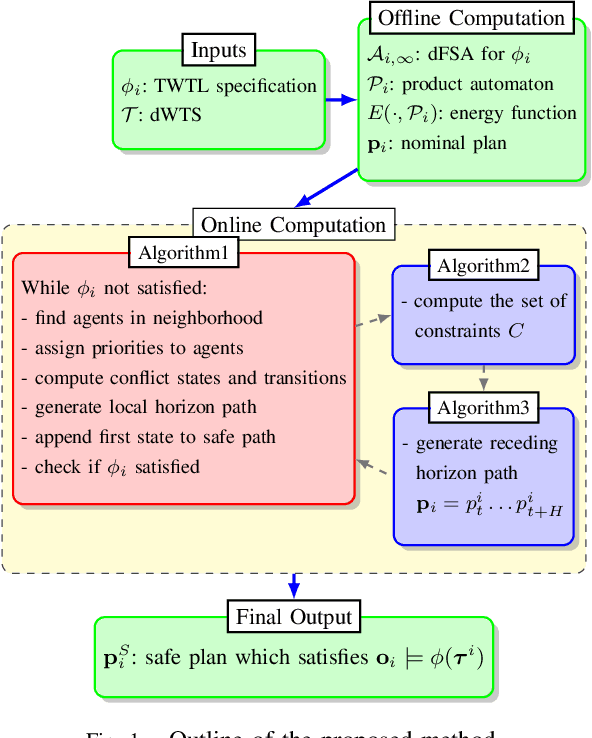



We investigate a multi-agent planning problem, where each agent aims to achieve an individual task while avoiding collisions with others. We assume that each agent's task is expressed as a Time-Window Temporal Logic (TWTL) specification defined over a 3D environment. We propose a decentralized receding horizon algorithm for online planning of trajectories. We show that when the environment is sufficiently connected, the resulting agent trajectories are always safe (collision-free) and lead to the satisfaction of the TWTL specifications or their finite temporal relaxations. Accordingly, deadlocks are always avoided and each agent is guaranteed to safely achieve its task with a finite time-delay in the worst case. Performance of the proposed algorithm is demonstrated via numerical simulations and experiments with quadrotors.