 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying Neural Signatures from fMRI using Hybrid Principal Components Regression
Sep 09, 2025Recent advances in neuroimaging analysis have enabled accurate decoding of mental state from brain activation patterns during functional magnetic resonance imaging scans. A commonly applied tool for this purpose is principal components regression regularized with the least absolute shrinkage and selection operator (LASSO PCR), a type of multi-voxel pattern analysis (MVPA). This model presumes that all components are equally likely to harbor relevant information, when in fact the task-related signal may be concentrated in specific components. In such cases, the model will fail to select the optimal set of principal components that maximizes the total signal relevant to the cognitive process under study. Here, we present modifications to LASSO PCR that allow for a regularization penalty tied directly to the index of the principal component, reflecting a prior belief that task-relevant signal is more likely to be concentrated in components explaining greater variance. Additionally, we propose a novel hybrid method, Joint Sparsity-Ranked LASSO (JSRL), which integrates component-level and voxel-level activity under an information parity framework and imposes ranked sparsity to guide component selection. We apply the models to brain activation during risk taking, monetary incentive, and emotion regulation tasks. Results demonstrate that incorporating sparsity ranking into LASSO PCR produces models with enhanced classification performance, with JSRL achieving up to 51.7\% improvement in cross-validated deviance $R^2$ and 7.3\% improvement in cross-validated AUC. Furthermore, sparsity-ranked models perform as well as or better than standard LASSO PCR approaches across all classification tasks and allocate predictive weight to brain regions consistent with their established functional roles, offering a robust alternative for MVPA.
Cutting-Edge Techniques for Depth Map Super-Resolution
Jun 27, 2023To overcome hardware limitations in commercially available depth sensors which result in low-resolution depth maps, depth map super-resolution (DMSR) is a practical and valuable computer vision task. DMSR requires upscaling a low-resolution (LR) depth map into a high-resolution (HR) space. Joint image filtering for DMSR has been applied using spatially-invariant and spatially-variant convolutional neural network (CNN) approaches. In this project, we propose a novel joint image filtering DMSR algorithm using a Swin transformer architecture. Furthermore, we introduce a Nonlinear Activation Free (NAF) network based on a conventional CNN model used in cutting-edge image restoration applications and compare the performance of the techniques. The proposed algorithms are validated through numerical studies and visual examples demonstrating improvements to state-of-the-art performance while maintaining competitive computation time for noisy depth map super-resolution.
Decentralized Safe Reactive Planning under TWTL Specifications
Jul 23, 2020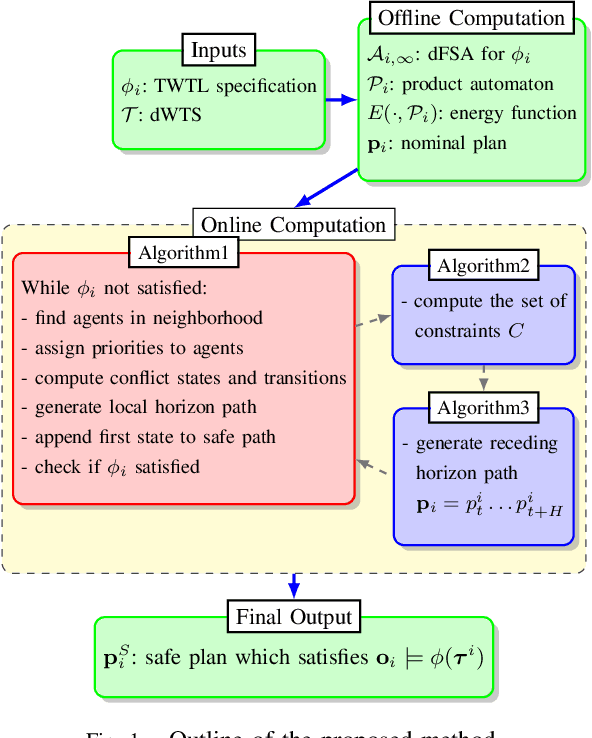



We investigate a multi-agent planning problem, where each agent aims to achieve an individual task while avoiding collisions with others. We assume that each agent's task is expressed as a Time-Window Temporal Logic (TWTL) specification defined over a 3D environment. We propose a decentralized receding horizon algorithm for online planning of trajectories. We show that when the environment is sufficiently connected, the resulting agent trajectories are always safe (collision-free) and lead to the satisfaction of the TWTL specifications or their finite temporal relaxations. Accordingly, deadlocks are always avoided and each agent is guaranteed to safely achieve its task with a finite time-delay in the worst case. Performance of the proposed algorithm is demonstrated via numerical simulations and experiments with quadrotors.