 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Safe Reactive Planning under TWTL Specifications
Paper and Code
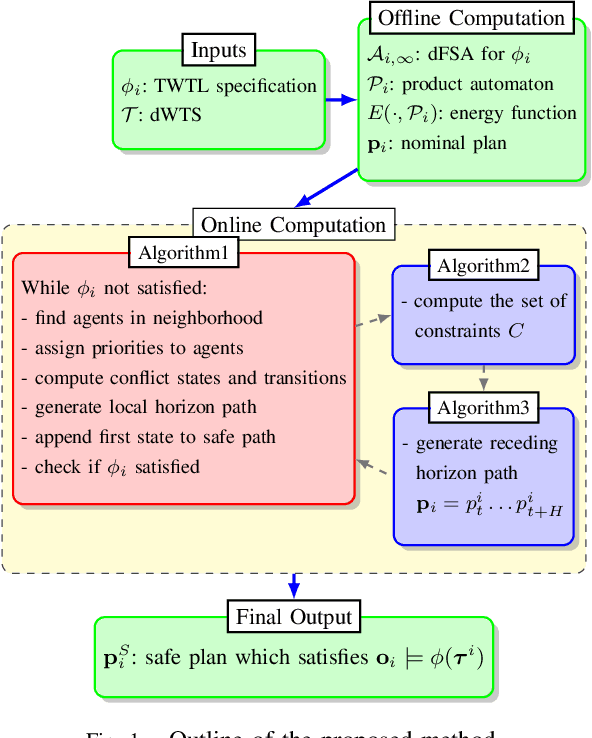



We investigate a multi-agent planning problem, where each agent aims to achieve an individual task while avoiding collisions with others. We assume that each agent's task is expressed as a Time-Window Temporal Logic (TWTL) specification defined over a 3D environment. We propose a decentralized receding horizon algorithm for online planning of trajectories. We show that when the environment is sufficiently connected, the resulting agent trajectories are always safe (collision-free) and lead to the satisfaction of the TWTL specifications or their finite temporal relaxations. Accordingly, deadlocks are always avoided and each agent is guaranteed to safely achieve its task with a finite time-delay in the worst case. Performance of the proposed algorithm is demonstrated via numerical simulations and experiments with quadrotors.