 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Synthesis using Signal Temporal Logic Specifications with Integral and Derivative Predicates
Paper and Code
Mar 26, 2021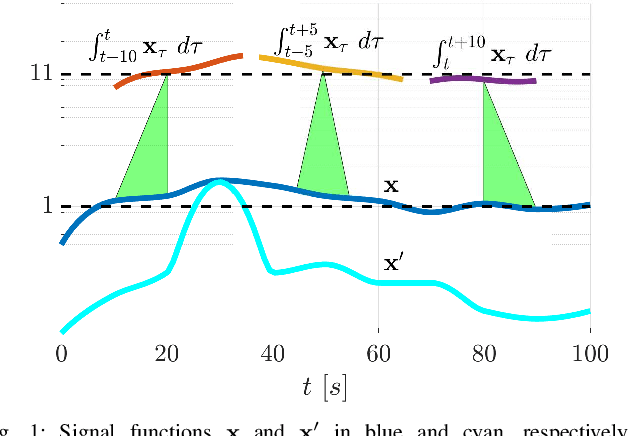
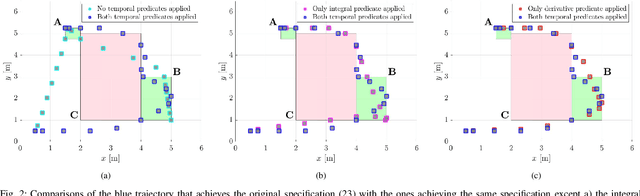

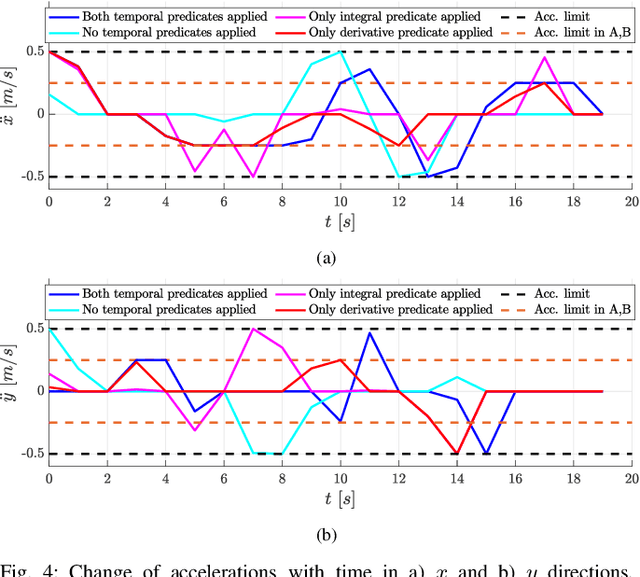
In many applications, the integrals and derivatives of signals carry valuable information (e.g., cumulative success over a time window, the rate of change) regarding the behavior of the underlying system. In this paper, we extend the expressiveness of Signal Temporal Logic (STL) by introducing predicates that can define rich properties related to the integral and derivative of a signal. For control synthesis, the new predicates are encoded into mixed-integer linear inequalities and are used in the formulation of a mixed-integer linear program to find a trajectory that satisfies an STL specification. We discuss the benefits of using the new predicates and illustrate them in a case study showing the influence of the new predicates on the trajectories of an autonomous robot.