 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQTOS: An Open-Source Quadruped Trajectory Optimization Stack
Sep 16, 2023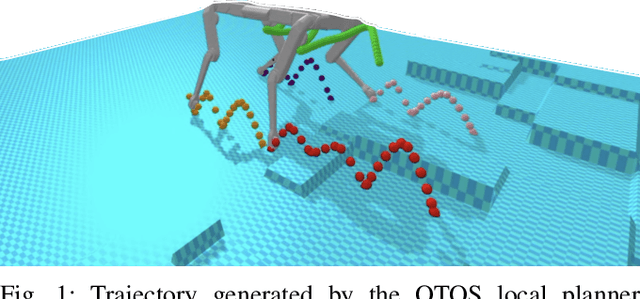
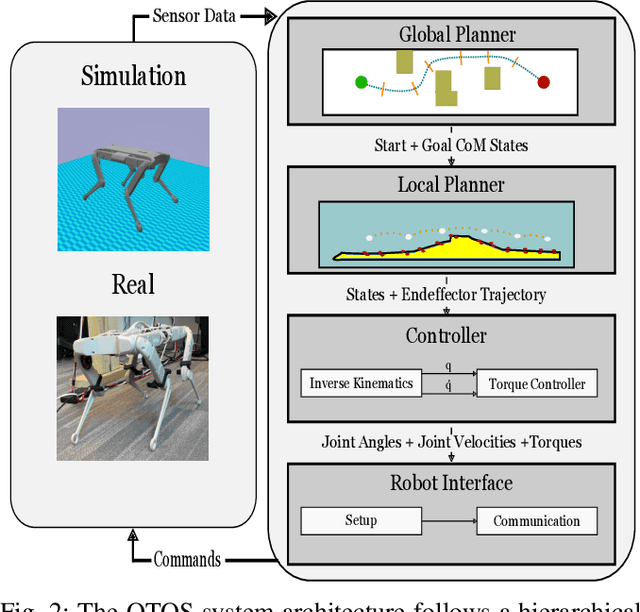
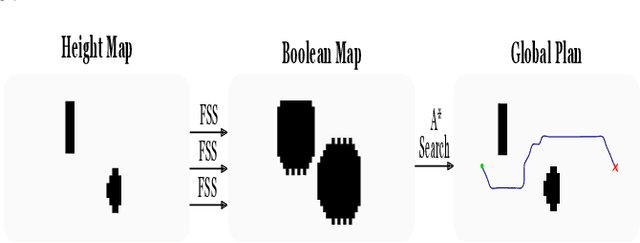
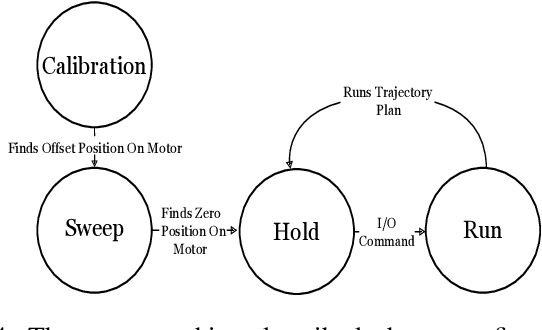
We introduce a new open-source framework, Quadruped Trajectory Optimization Stack (QTOS), which integrates a global planner, local planner, simulator, controller, and robot interface into a single package. QTOS serves as a full-stack interface, simplifying continuous motion planning on an open-source quadruped platform by bridging the gap between middleware and gait planning. It empowers users to effortlessly translate high-level navigation objectives into low-level robot commands. Furthermore, QTOS enhances the stability and adaptability of long-distance gait planning across challenging terrain.
Learning to Walk by Steering: Perceptive Quadrupedal Locomotion in Dynamic Environments
Sep 19, 2022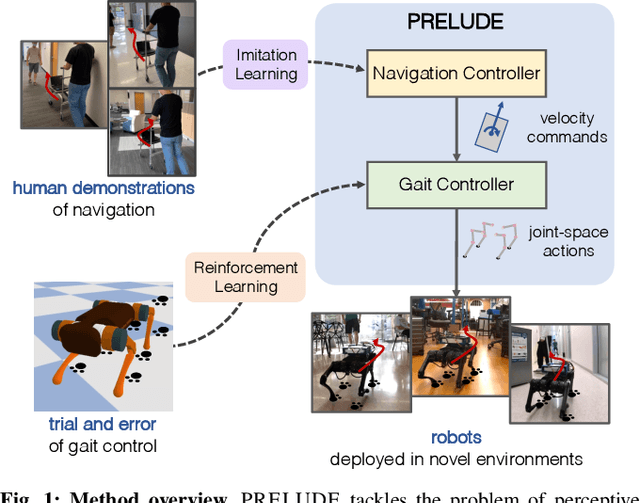
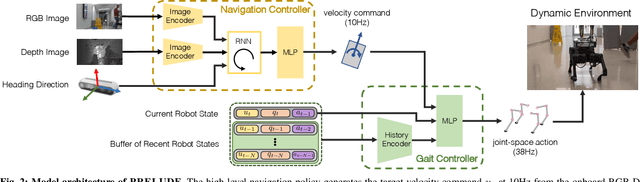
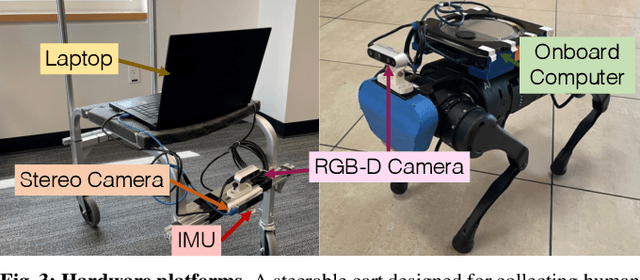
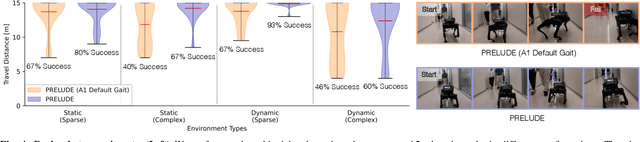
We tackle the problem of perceptive locomotion in dynamic environments. In this problem, a quadrupedal robot must exhibit robust and agile walking behaviors in response to environmental clutter and moving obstacles. We present a hierarchical learning framework, named PRELUDE, which decomposes the problem of perceptive locomotion into high-level decision-making to predict navigation commands and low-level gait generation to realize the target commands. In this framework, we train the high-level navigation controller with imitation learning on human demonstrations collected on a steerable cart and the low-level gait controller with reinforcement learning (RL). Therefore, our method can acquire complex navigation behaviors from human supervision and discover versatile gaits from trial and error. We demonstrate the effectiveness of our approach in simulation and with hardware experiments. Video and code can be found on https://ut-austin-rpl.github.io/PRELUDE.