 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull Domain Analysis in Fluid Dynamics
May 28, 2025Novel techniques in evolutionary optimization, simulation and machine learning allow for a broad analysis of domains like fluid dynamics, in which computation is expensive and flow behavior is complex. Under the term of full domain analysis we understand the ability to efficiently determine the full space of solutions in a problem domain, and analyze the behavior of those solutions in an accessible and interactive manner. The goal of full domain analysis is to deepen our understanding of domains by generating many examples of flow, their diversification, optimization and analysis. We define a formal model for full domain analysis, its current state of the art, and requirements of subcomponents. Finally, an example is given to show what we can learn by using full domain analysis. Full domain analysis, rooted in optimization and machine learning, can be a helpful tool in understanding complex systems in computational physics and beyond.
On the Suitability of Representations for Quality Diversity Optimization of Shapes
Apr 07, 2023The representation, or encoding, utilized in evolutionary algorithms has a substantial effect on their performance. Examination of the suitability of widely used representations for quality diversity optimization (QD) in robotic domains has yielded inconsistent results regarding the most appropriate encoding method. Given the domain-dependent nature of QD, additional evidence from other domains is necessary. This study compares the impact of several representations, including direct encoding, a dictionary-based representation, parametric encoding, compositional pattern producing networks, and cellular automata, on the generation of voxelized meshes in an architecture setting. The results reveal that some indirect encodings outperform direct encodings and can generate more diverse solution sets, especially when considering full phenotypic diversity. The paper introduces a multi-encoding QD approach that incorporates all evaluated representations in the same archive. Species of encodings compete on the basis of phenotypic features, leading to an approach that demonstrates similar performance to the best single-encoding QD approach. This is noteworthy, as it does not always require the contribution of the best-performing single encoding.
Efficient Quality Diversity Optimization of 3D Buildings through 2D Pre-optimization
Mar 28, 2023Quality diversity algorithms can be used to efficiently create a diverse set of solutions to inform engineers' intuition. But quality diversity is not efficient in very expensive problems, needing 100.000s of evaluations. Even with the assistance of surrogate models, quality diversity needs 100s or even 1000s of evaluations, which can make it use infeasible. In this study we try to tackle this problem by using a pre-optimization strategy on a lower-dimensional optimization problem and then map the solutions to a higher-dimensional case. For a use case to design buildings that minimize wind nuisance, we show that we can predict flow features around 3D buildings from 2D flow features around building footprints. For a diverse set of building designs, by sampling the space of 2D footprints with a quality diversity algorithm, a predictive model can be trained that is more accurate than when trained on a set of footprints that were selected with a space-filling algorithm like the Sobol sequence. Simulating only 16 buildings in 3D, a set of 1024 building designs with low predicted wind nuisance is created. We show that we can produce better machine learning models by producing training data with quality diversity instead of using common sampling techniques. The method can bootstrap generative design in a computationally expensive 3D domain and allow engineers to sweep the design space, understanding wind nuisance in early design phases.
Designing Air Flow with Surrogate-assisted Phenotypic Niching
May 10, 2021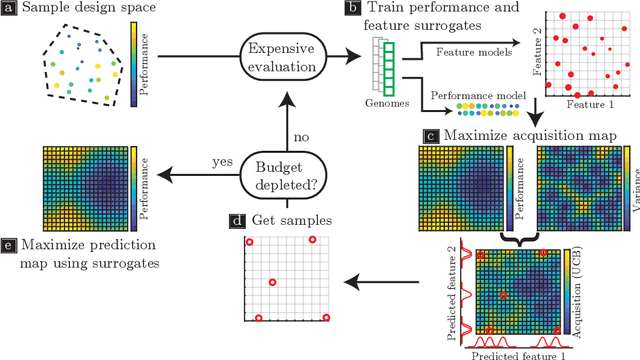

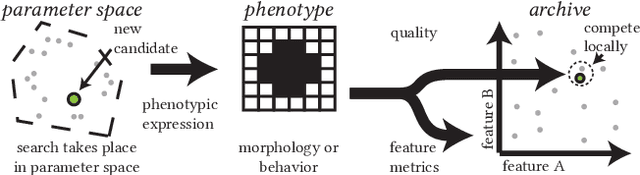
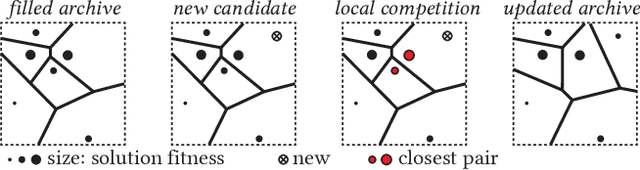
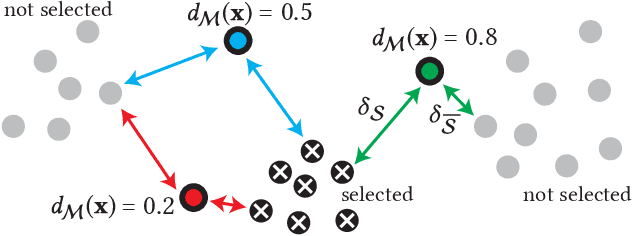
In complex, expensive optimization domains we often narrowly focus on finding high performing solutions, instead of expanding our understanding of the domain itself. But what if we could quickly understand the complex behaviors that can emerge in said domains instead? We introduce surrogate-assisted phenotypic niching, a quality diversity algorithm which allows to discover a large, diverse set of behaviors by using computationally expensive phenotypic features. In this work we discover the types of air flow in a 2D fluid dynamics optimization problem. A fast GPU-based fluid dynamics solver is used in conjunction with surrogate models to accurately predict fluid characteristics from the shapes that produce the air flow. We show that these features can be modeled in a data-driven way while sampling to improve performance, rather than explicitly sampling to improve feature models. Our method can reduce the need to run an infeasibly large set of simulations while still being able to design a large diversity of air flows and the shapes that cause them. Discovering diversity of behaviors helps engineers to better understand expensive domains and their solutions.
An Analysis of Phenotypic Diversity in Multi-Solution Optimization
May 10, 2021
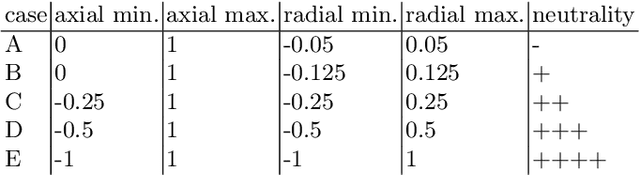
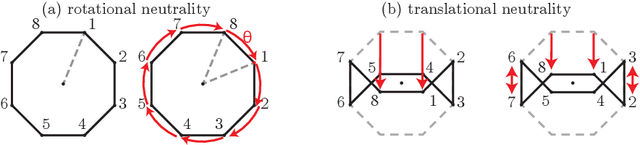
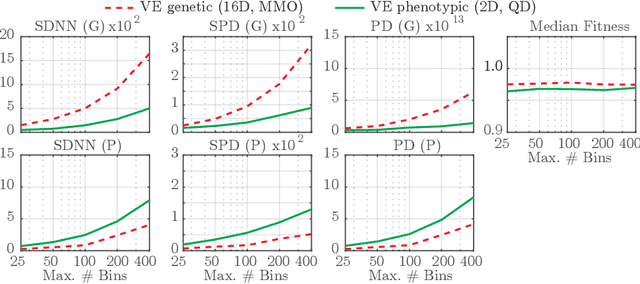
More and more, optimization methods are used to find diverse solution sets. We compare solution diversity in multi-objective optimization, multimodal optimization, and quality diversity in a simple domain. We show that multiobjective optimization does not always produce much diversity, multimodal optimization produces higher fitness solutions, and quality diversity is not sensitive to genetic neutrality and creates the most diverse set of solutions. An autoencoder is used to discover phenotypic features automatically, producing an even more diverse solution set with quality diversity. Finally, we make recommendations about when to use which approach.
Expressivity of Parameterized and Data-driven Representations in Quality Diversity Search
May 10, 2021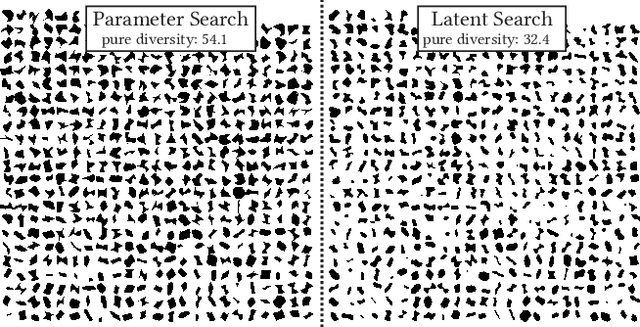
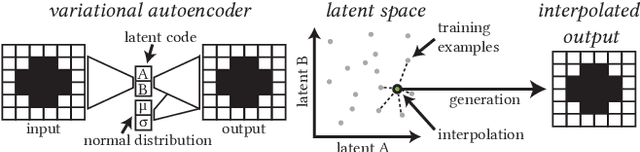
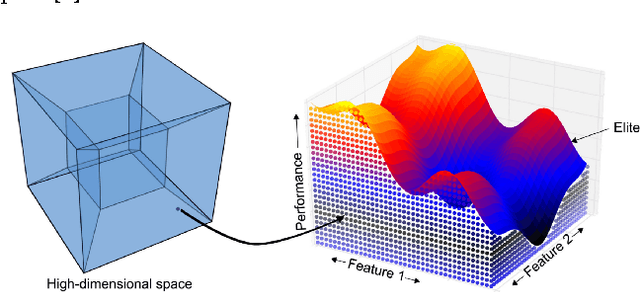
We consider multi-solution optimization and generative models for the generation of diverse artifacts and the discovery of novel solutions. In cases where the domain's factors of variation are unknown or too complex to encode manually, generative models can provide a learned latent space to approximate these factors. When used as a search space, however, the range and diversity of possible outputs are limited to the expressivity and generative capabilities of the learned model. We compare the output diversity of a quality diversity evolutionary search performed in two different search spaces: 1) a predefined parameterized space and 2) the latent space of a variational autoencoder model. We find that the search on an explicit parametric encoding creates more diverse artifact sets than searching the latent space. A learned model is better at interpolating between known data points than at extrapolating or expanding towards unseen examples. We recommend using a generative model's latent space primarily to measure similarity between artifacts rather than for search and generation. Whenever a parametric encoding is obtainable, it should be preferred over a learned representation as it produces a higher diversity of solutions.
Prediction of neural network performance by phenotypic modeling
Jul 16, 2019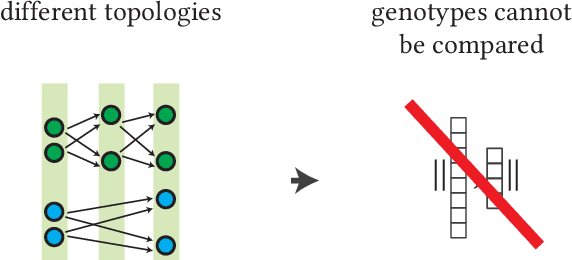
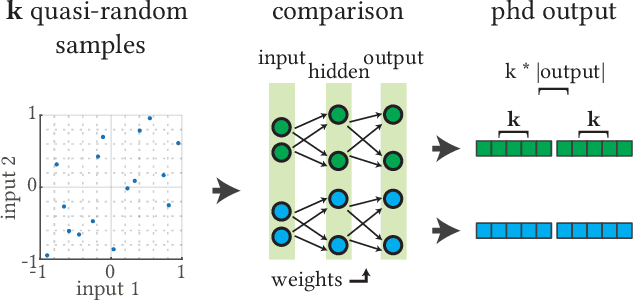
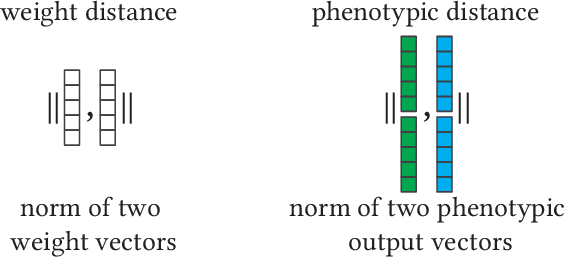
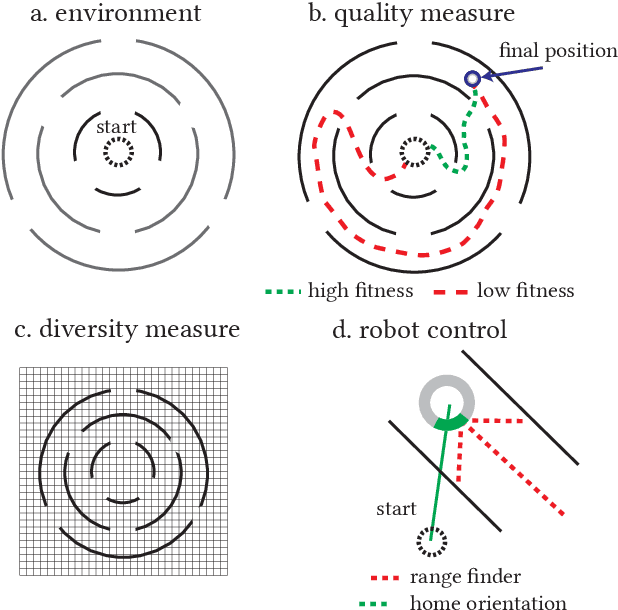
Surrogate models are used to reduce the burden of expensive-to-evaluate objective functions in optimization. By creating models which map genomes to objective values, these models can estimate the performance of unknown inputs, and so be used in place of expensive objective functions. Evolutionary techniques such as genetic programming or neuroevolution commonly alter the structure of the genome itself. A lack of consistency in the genotype is a fatal blow to data-driven modeling techniques: interpolation between points is impossible without a common input space. However, while the dimensionality of genotypes may differ across individuals, in many domains, such as controllers or classifiers, the dimensionality of the input and output remains constant. In this work we leverage this insight to embed differing neural networks into the same input space. To judge the difference between the behavior of two neural networks, we give them both the same input sequence, and examine the difference in output. This difference, the phenotypic distance, can then be used to situate these networks into a common input space, allowing us to produce surrogate models which can predict the performance of neural networks regardless of topology. In a robotic navigation task, we show that models trained using this phenotypic embedding perform as well or better as those trained on the weight values of a fixed topology neural network. We establish such phenotypic surrogate models as a promising and flexible approach which enables surrogate modeling even for representations that undergo structural changes.
Modeling User Selection in Quality Diversity
Jul 16, 2019
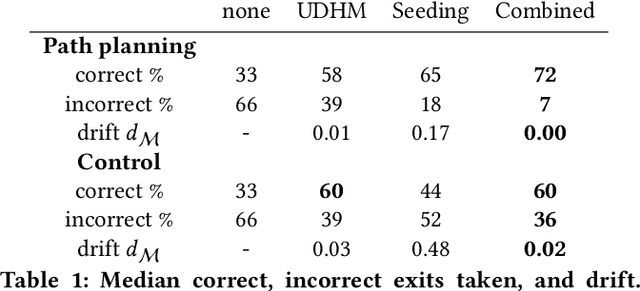
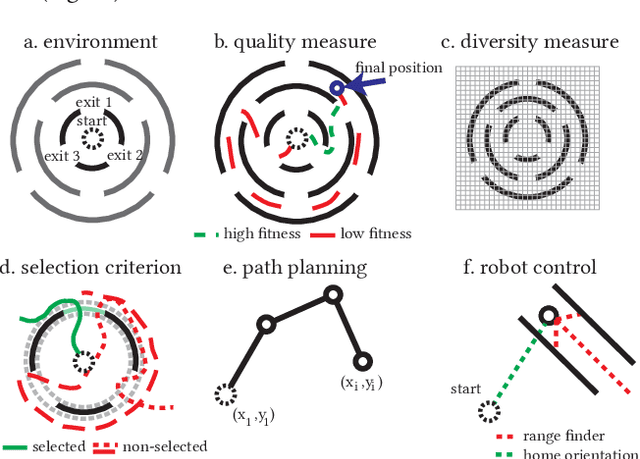
The initial phase in real world engineering optimization and design is a process of discovery in which not all requirements can be made in advance, or are hard to formalize. Quality diversity algorithms, which produce a variety of high performing solutions, provide a unique chance to support engineers and designers in the search for what is possible and high performing. In this work we begin to answer the question how a user can interact with quality diversity and turn it into an interactive innovation aid. By modeling a user's selection it can be determined whether the optimization is drifting away from the user's preferences. The optimization is then constrained by adding a penalty to the objective function. We present an interactive quality diversity algorithm that can take into account the user's selection. The approach is evaluated in a new multimodal optimization benchmark that allows various optimization tasks to be performed. The user selection drift of the approach is compared to a state of the art alternative on both a planning and a neuroevolution control task, thereby showing its limits and possibilities.
Prototype Discovery using Quality-Diversity
Jul 25, 2018



An iterative computer-aided ideation procedure is introduced, building on recent quality-diversity algorithms, which search for diverse as well as high-performing solutions. Dimensionality reduction is used to define a similarity space, in which solutions are clustered into classes. These classes are represented by prototypes, which are presented to the user for selection. In the next iteration, quality-diversity focuses on searching within the selected class. A quantitative analysis is performed on a 2D airfoil, and a more complex 3D side view mirror domain shows how computer-aided ideation can help to enhance engineers' intuition while allowing their design decisions to influence the design process.
Hierarchical Surrogate Modeling for Illumination Algorithms
Mar 29, 2017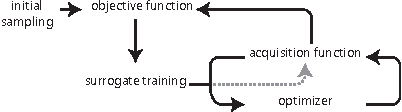

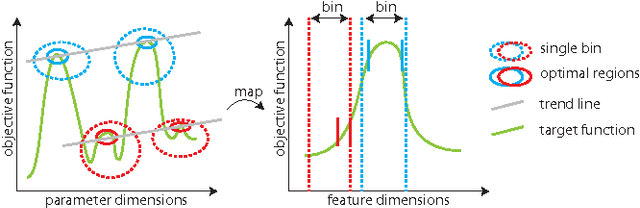
Evolutionary illumination is a recent technique that allows producing many diverse, optimal solutions in a map of manually defined features. To support the large amount of objective function evaluations, surrogate model assistance was recently introduced. Illumination models need to represent many more, diverse optimal regions than classical surrogate models. In this PhD thesis, we propose to decompose the sample set, decreasing model complexity, by hierarchically segmenting the training set according to their coordinates in feature space. An ensemble of diverse models can then be trained to serve as a surrogate to illumination.