 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Correspondence Fields: Learned Differentiable Rendering for 3D Pose Refinement in the Wild
Jul 17, 2020
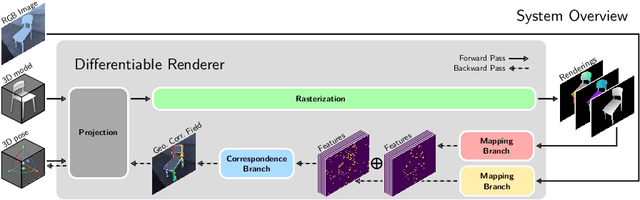
We present a novel 3D pose refinement approach based on differentiable rendering for objects of arbitrary categories in the wild. In contrast to previous methods, we make two main contributions: First, instead of comparing real-world images and synthetic renderings in the RGB or mask space, we compare them in a feature space optimized for 3D pose refinement. Second, we introduce a novel differentiable renderer that learns to approximate the rasterization backward pass from data instead of relying on a hand-crafted algorithm. For this purpose, we predict deep cross-domain correspondences between RGB images and 3D model renderings in the form of what we call geometric correspondence fields. These correspondence fields serve as pixel-level gradients which are analytically propagated backward through the rendering pipeline to perform a gradient-based optimization directly on the 3D pose. In this way, we precisely align 3D models to objects in RGB images which results in significantly improved 3D pose estimates. We evaluate our approach on the challenging Pix3D dataset and achieve up to 55% relative improvement compared to state-of-the-art refinement methods in multiple metrics.
Location Field Descriptors: Single Image 3D Model Retrieval in the Wild
Aug 07, 2019
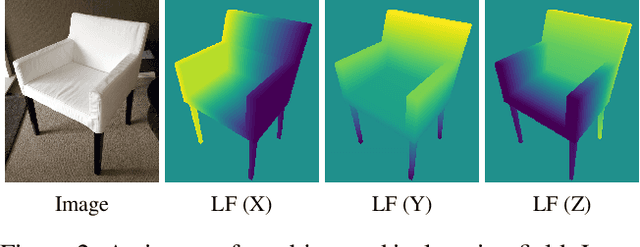
We present Location Field Descriptors, a novel approach for single image 3D model retrieval in the wild. In contrast to previous methods that directly map 3D models and RGB images to an embedding space, we establish a common low-level representation in the form of location fields from which we compute pose invariant 3D shape descriptors. Location fields encode correspondences between 2D pixels and 3D surface coordinates and, thus, explicitly capture 3D shape and 3D pose information without appearance variations which are irrelevant for the task. This early fusion of 3D models and RGB images results in three main advantages: First, the bottleneck location field prediction acts as a regularizer during training. Second, major parts of the system benefit from training on a virtually infinite amount of synthetic data. Finally, the predicted location fields are visually interpretable and unblackbox the system. We evaluate our proposed approach on three challenging real-world datasets (Pix3D, Comp, and Stanford) with different object categories and significantly outperform the state-of-the-art by up to 20% absolute in multiple 3D retrieval metrics.
GP2C: Geometric Projection Parameter Consensus for Joint 3D Pose and Focal Length Estimation in the Wild
Aug 07, 2019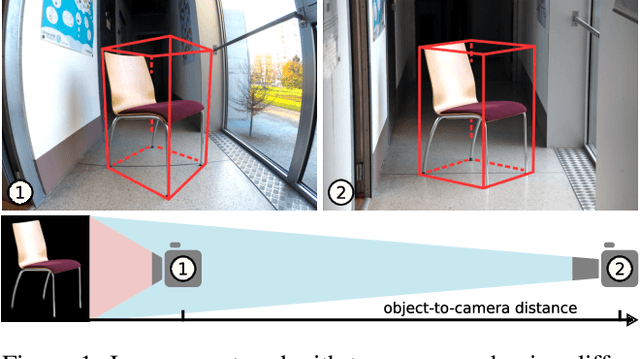
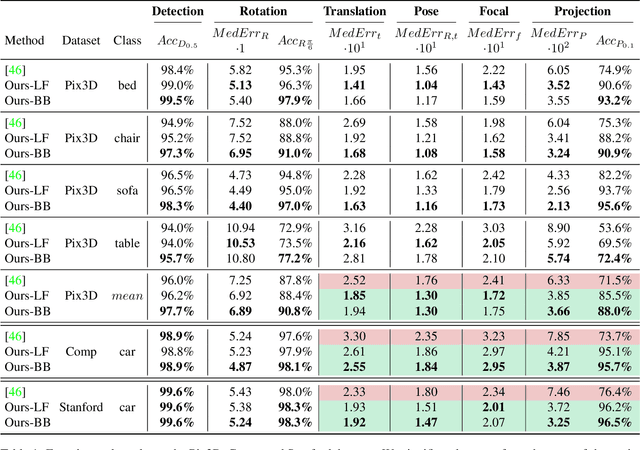


We present a joint 3D pose and focal length estimation approach for object categories in the wild. In contrast to previous methods that predict 3D poses independently of the focal length or assume a constant focal length, we explicitly estimate and integrate the focal length into the 3D pose estimation. For this purpose, we combine deep learning techniques and geometric algorithms in a two-stage approach: First, we estimate an initial focal length and establish 2D-3D correspondences from a single RGB image using a deep network. Second, we recover 3D poses and refine the focal length by minimizing the reprojection error of the predicted correspondences. In this way, we exploit the geometric prior given by the focal length for 3D pose estimation. This results in two advantages: First, we achieve significantly improved 3D translation and 3D pose accuracy compared to existing methods. Second, our approach finds a geometric consensus between the individual projection parameters, which is required for precise 2D-3D alignment. We evaluate our proposed approach on three challenging real-world datasets (Pix3D, Comp, and Stanford) with different object categories and significantly outperform the state-of-the-art by up to 20% absolute in multiple different metrics.
3D Pose Estimation and 3D Model Retrieval for Objects in the Wild
Mar 30, 2018


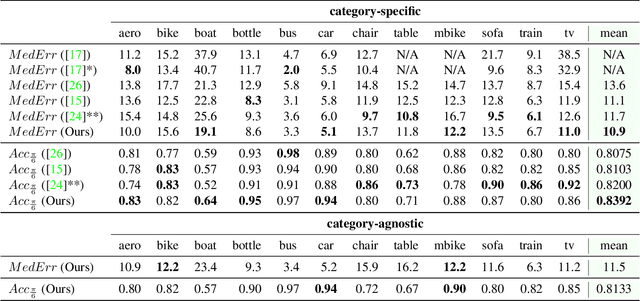
We propose a scalable, efficient and accurate approach to retrieve 3D models for objects in the wild. Our contribution is twofold. We first present a 3D pose estimation approach for object categories which significantly outperforms the state-of-the-art on Pascal3D+. Second, we use the estimated pose as a prior to retrieve 3D models which accurately represent the geometry of objects in RGB images. For this purpose, we render depth images from 3D models under our predicted pose and match learned image descriptors of RGB images against those of rendered depth images using a CNN-based multi-view metric learning approach. In this way, we are the first to report quantitative results for 3D model retrieval on Pascal3D+, where our method chooses the same models as human annotators for 50% of the validation images on average. In addition, we show that our method, which was trained purely on Pascal3D+, retrieves rich and accurate 3D models from ShapeNet given RGB images of objects in the wild.
* Accepted to Conference on Computer Vision and Pattern Recognition (CVPR) 2018