 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Pose Estimation and 3D Model Retrieval for Objects in the Wild
Paper and Code
Mar 30, 2018


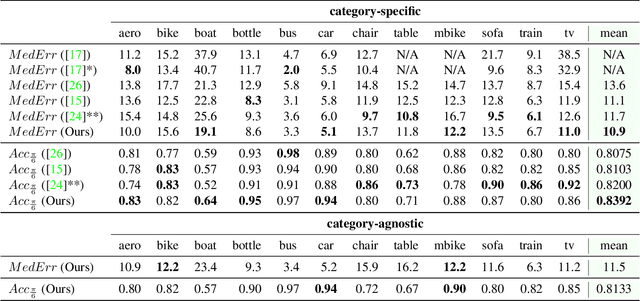
We propose a scalable, efficient and accurate approach to retrieve 3D models for objects in the wild. Our contribution is twofold. We first present a 3D pose estimation approach for object categories which significantly outperforms the state-of-the-art on Pascal3D+. Second, we use the estimated pose as a prior to retrieve 3D models which accurately represent the geometry of objects in RGB images. For this purpose, we render depth images from 3D models under our predicted pose and match learned image descriptors of RGB images against those of rendered depth images using a CNN-based multi-view metric learning approach. In this way, we are the first to report quantitative results for 3D model retrieval on Pascal3D+, where our method chooses the same models as human annotators for 50% of the validation images on average. In addition, we show that our method, which was trained purely on Pascal3D+, retrieves rich and accurate 3D models from ShapeNet given RGB images of objects in the wild.