 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow many Observations are Enough? Knowledge Distillation for Trajectory Forecasting
Mar 09, 2022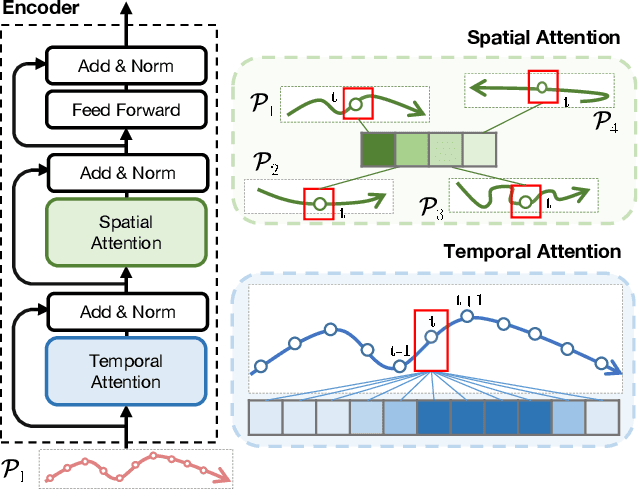
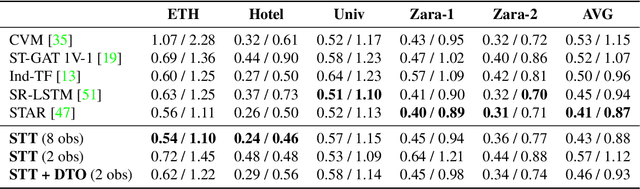
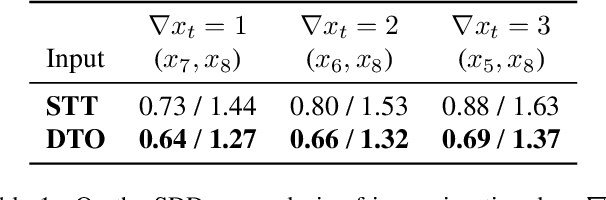
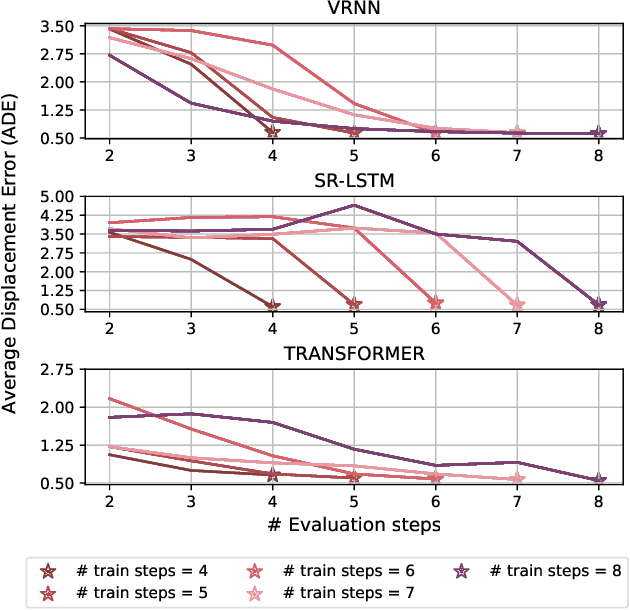
Accurate prediction of future human positions is an essential task for modern video-surveillance systems. Current state-of-the-art models usually rely on a "history" of past tracked locations (e.g., 3 to 5 seconds) to predict a plausible sequence of future locations (e.g., up to the next 5 seconds). We feel that this common schema neglects critical traits of realistic applications: as the collection of input trajectories involves machine perception (i.e., detection and tracking), incorrect detection and fragmentation errors may accumulate in crowded scenes, leading to tracking drifts. On this account, the model would be fed with corrupted and noisy input data, thus fatally affecting its prediction performance. In this regard, we focus on delivering accurate predictions when only few input observations are used, thus potentially lowering the risks associated with automatic perception. To this end, we conceive a novel distillation strategy that allows a knowledge transfer from a teacher network to a student one, the latter fed with fewer observations (just two ones). We show that a properly defined teacher supervision allows a student network to perform comparably to state-of-the-art approaches that demand more observations. Besides, extensive experiments on common trajectory forecasting datasets highlight that our student network better generalizes to unseen scenarios.
Waveguide Components and Aperture Antennas With Frequency- and Time-Domain Selectivity Properties
Dec 21, 2020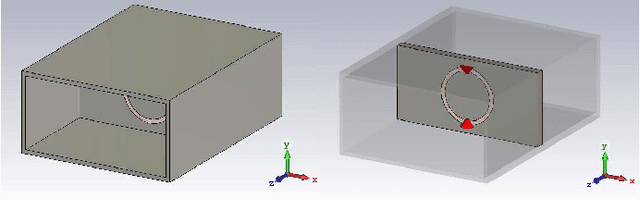
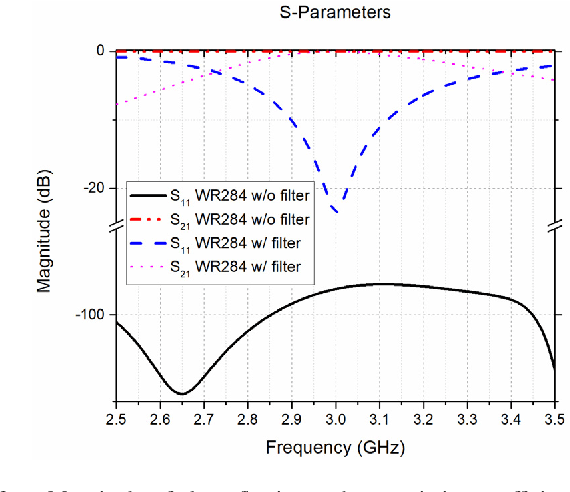
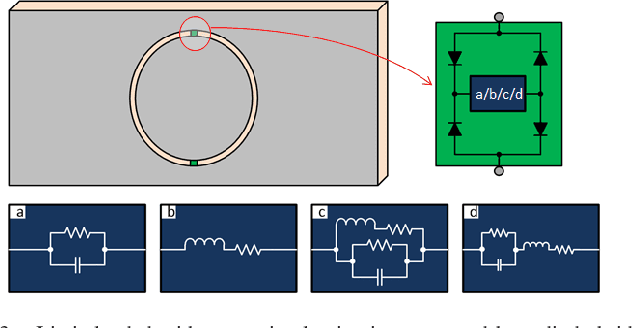
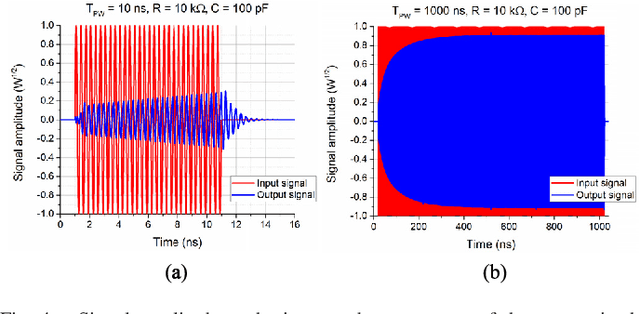
Filtering modules are essential devices of modern microwave systems given their capability to improve the signal-to-noise ratio of the received signal or to eliminate the unwanted interferences. For discriminating between different components, a filter exhibits a frequency-selective response that, however, is not able to distinguish between different signals whose spectrum falls within the passband of the filter itself. In this regard, some electromagnetic structures exhibiting, at the same frequency, different responses depending on the waveform of the incoming waves have been recently proposed. In this communication, we extend the aforementioned approach to the case of a standard waveguide filtering module. In particular, by loading a bandpass filtering iris with a proper lumped-element circuit, we design a waveguide component able to distinguish between different pulsed waves, even at the same frequency, depending on their pulsewidth. Moreover, by using this filter for capping an open-ended rectangular waveguide, a radiating element with both frequency- and time-domain selectivity properties is presented. The structures discussed in this communication may pave the way to a new class of microwave systems that, being both frequency selective and time selective, are less sensitive to noise and interferences.
DAG-Net: Double Attentive Graph Neural Network for Trajectory Forecasting
May 26, 2020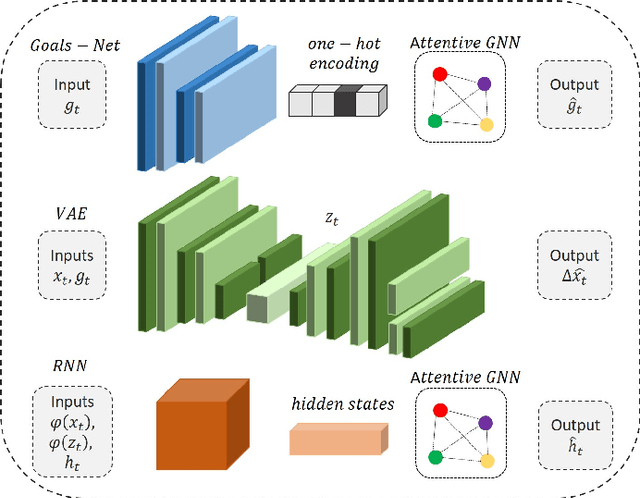
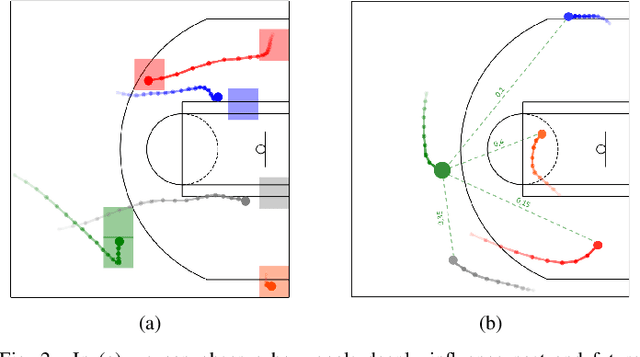
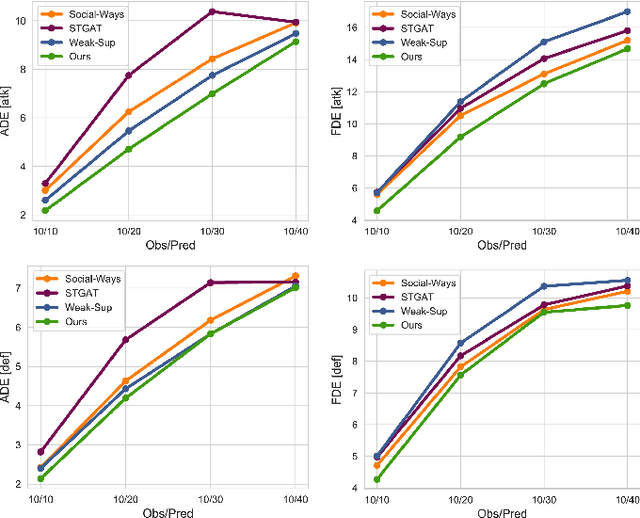
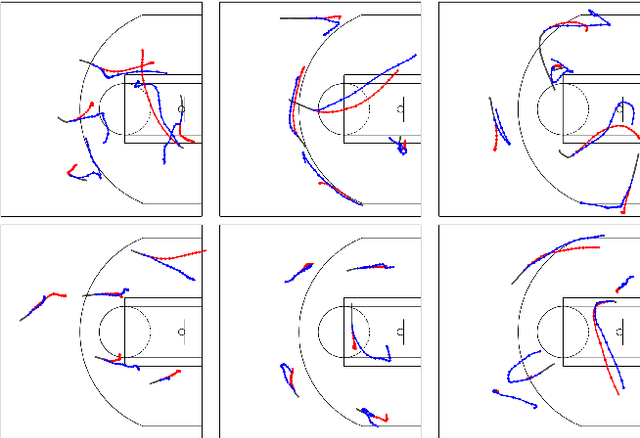
Understanding human motion behaviour is a critical task for several possible applications like self-driving cars or social robots, and in general for all those settings where an autonomous agent has to navigate inside a human-centric environment. This is non-trivial because human motion is inherently multi-modal: given a history of human motion paths, there are many plausible ways by which people could move in the future. Additionally, people activities are often driven by goals, e.g. reaching particular locations or interacting with the environment. We address both the aforementioned aspects by proposing a new recurrent generative model that considers both single agents' future goals and interactions between different agents. The model exploits a double attention-based graph neural network to collect information about the mutual influences among different agents and integrates it with data about agents' possible future objectives. Our proposal is general enough to be applied in different scenarios: the model achieves state-of-the-art results in both urban environments and also in sports applications.