 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Climate Change Knowledge Graph: Supporting Climate Services
Feb 23, 2026Climate change impacts a broad spectrum of human resources and activities, necessitating the use of climate models to project long-term effects and inform mitigation and adaptation strategies. These models generate multiple datasets by running simulations across various scenarios and configurations, thereby covering a range of potential future outcomes. Currently, researchers rely on traditional search interfaces and APIs to retrieve such datasets, often piecing together information from metadata and community vocabularies. The Climate Change Knowledge Graph is designed to address these challenges by integrating diverse data sources related to climate simulations into a coherent and interoperable knowledge graph. This innovative resource allows for executing complex queries involving climate models, simulations, variables, spatio-temporal domains, and granularities. Developed with input from domain experts, the knowledge graph and its underlying ontology are published with open access license and provide a comprehensive framework that enhances the exploration of climate data, facilitating more informed decision-making in addressing climate change issues.
Neurosymbolic Graph Enrichment for Grounded World Models
Nov 19, 2024

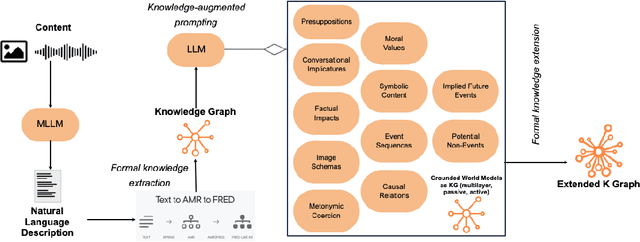
The development of artificial intelligence systems capable of understanding and reasoning about complex real-world scenarios is a significant challenge. In this work we present a novel approach to enhance and exploit LLM reactive capability to address complex problems and interpret deeply contextual real-world meaning. We introduce a method and a tool for creating a multimodal, knowledge-augmented formal representation of meaning that combines the strengths of large language models with structured semantic representations. Our method begins with an image input, utilizing state-of-the-art large language models to generate a natural language description. This description is then transformed into an Abstract Meaning Representation (AMR) graph, which is formalized and enriched with logical design patterns, and layered semantics derived from linguistic and factual knowledge bases. The resulting graph is then fed back into the LLM to be extended with implicit knowledge activated by complex heuristic learning, including semantic implicatures, moral values, embodied cognition, and metaphorical representations. By bridging the gap between unstructured language models and formal semantic structures, our method opens new avenues for tackling intricate problems in natural language understanding and reasoning.
A Reference Software Architecture for Social Robots
Jul 09, 2020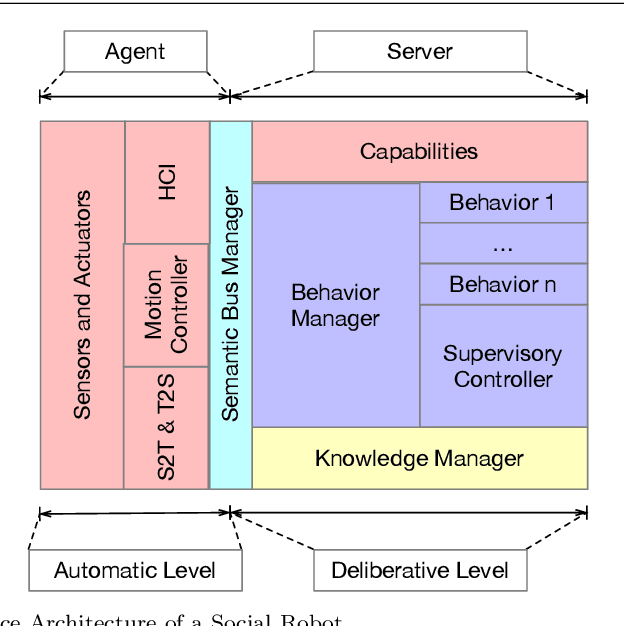
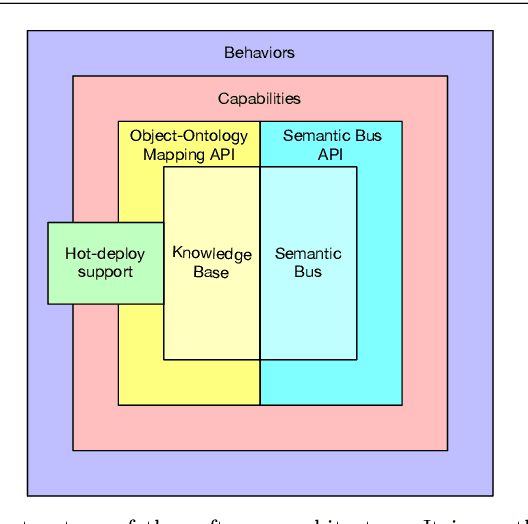
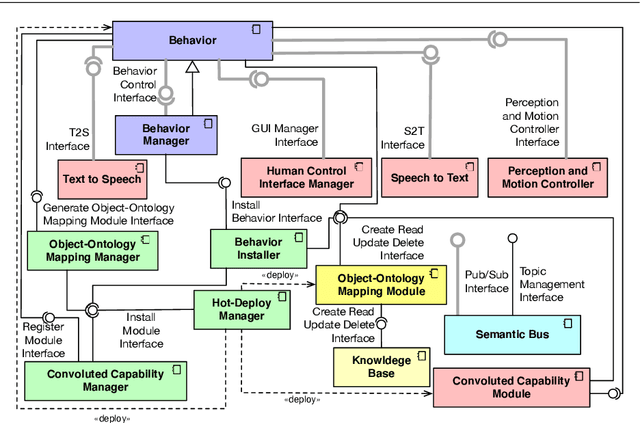

Social Robotics poses tough challenges to software designers who are required to take care of difficult architectural drivers like acceptability, trust of robots as well as to guarantee that robots establish a personalised interaction with their users. Moreover, in this context recurrent software design issues such as ensuring interoperability, improving reusability and customizability of software components also arise. Designing and implementing social robotic software architectures is a time-intensive activity requiring multi-disciplinary expertise: this makes difficult to rapidly develop, customise, and personalise robotic solutions. These challenges may be mitigated at design time by choosing certain architectural styles, implementing specific architectural patterns and using particular technologies. Leveraging on our experience in the MARIO project, in this paper we propose a series of principles that social robots may benefit from. These principles lay also the foundations for the design of a reference software architecture for Social Robots. The ultimate goal of this work is to establish a common ground based on a reference software architecture to allow to easily reuse robotic software components in order to rapidly develop, implement, and personalise Social Robots.