 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOvercoming the Regulatory Bottleneck via Agent-to-Agent Protocols: A Nuclear Case Study
Jun 05, 2026Regulatory review of advanced nuclear reactor designs routinely spans more than three years and consumes hundreds of millions of dollars in combined regulator and applicant labor. We present the Regulatory Context Protocol (RCP), an Agent-to-Agent communication standard that replaces the formal human-to-human pipeline between regulators and applicants with a structured, auditable agentic channel, while preserving human oversight at safety-significant decision points. The protocol is calibrated against an analysis of 1,236 documents from U.S. Nuclear Regulatory Commission advanced reactor dockets and demonstrated with a working multi-agent pilot. Against an 89M USD, 42-month Reconstructed Baseline, RCP cuts costs by 50-77 percent (21M-44M USD) and timelines by 65 percent (15 months). Without a shared protocol, Standalone Agents reach only 54M-74M USD and 21 months. The residual cost-and-time gap is structural, not algorithmic: it traces to the inter-organizational pipeline that only an agent-to-agent standard can compress. The same bottleneck - formal multi-party review under strict auditability requirements - characterizes pharmaceutical approvals, environmental permitting, financial supervision, and aviation certification. The US regulatory paperwork burden carries a 426.5 billion USD annual opportunity cost; replicated broadly, the projected 50-77 percent reduction implies savings on the order of 210-330 billion USD per year - approaching 1 percent of US GDP.
Integrating LLMs for Explainable Fault Diagnosis in Complex Systems
Feb 08, 2024This paper introduces an integrated system designed to enhance the explainability of fault diagnostics in complex systems, such as nuclear power plants, where operator understanding is critical for informed decision-making. By combining a physics-based diagnostic tool with a Large Language Model, we offer a novel solution that not only identifies faults but also provides clear, understandable explanations of their causes and implications. The system's efficacy is demonstrated through application to a molten salt facility, showcasing its ability to elucidate the connections between diagnosed faults and sensor data, answer operator queries, and evaluate historical sensor anomalies. Our approach underscores the importance of merging model-based diagnostics with advanced AI to improve the reliability and transparency of autonomous systems.
A Safe Reinforcement Learning Algorithm for Supervisory Control of Power Plants
Jan 23, 2024Traditional control theory-based methods require tailored engineering for each system and constant fine-tuning. In power plant control, one often needs to obtain a precise representation of the system dynamics and carefully design the control scheme accordingly. Model-free Reinforcement learning (RL) has emerged as a promising solution for control tasks due to its ability to learn from trial-and-error interactions with the environment. It eliminates the need for explicitly modeling the environment's dynamics, which is potentially inaccurate. However, the direct imposition of state constraints in power plant control raises challenges for standard RL methods. To address this, we propose a chance-constrained RL algorithm based on Proximal Policy Optimization for supervisory control. Our method employs Lagrangian relaxation to convert the constrained optimization problem into an unconstrained objective, where trainable Lagrange multipliers enforce the state constraints. Our approach achieves the smallest distance of violation and violation rate in a load-follow maneuver for an advanced Nuclear Power Plant design.
Design of a Supervisory Control System for Autonomous Operation of Advanced Reactors
Sep 09, 2022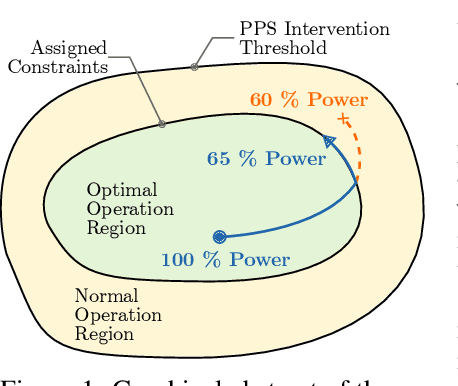
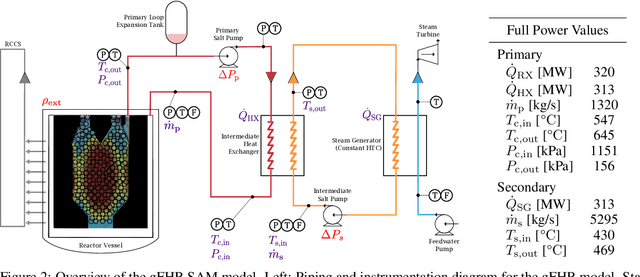
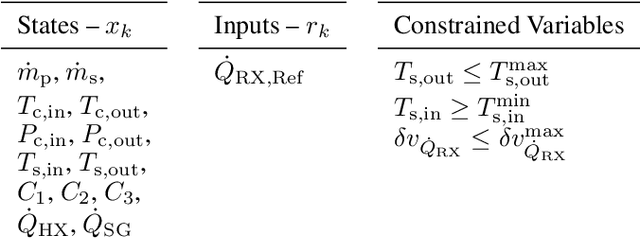

Advanced reactors deployed in the coming decades will face deregulated energy markets, and may adopt flexible operation to boost profitability. To aid in the transition from baseload to flexible operation paradigm, autonomous operation is sought. This work focuses on the control aspect of autonomous operation. Specifically, a hierarchical control system is designed to support constraint enforcement during routine operational transients. Within the system, data-driven modeling, physics-based state observation, and classical control algorithms are integrated to provide an adaptable and robust solution. A 320 MW Fluoride-cooled High-temperature Pebble-bed Reactor is the design basis for demonstrating the control system. The hierarchical control system consists of a supervisory layer and low-level layer. The supervisory layer receives requests to change the system's operating conditions, and accepts or rejects them based on constraints that have been assigned. Constraints are issued to keep the plant within an optimal operating region. The low-level layer interfaces with the actuators of the system to fulfill requested changes, while maintaining tracking and regulation duties. To accept requests at the supervisory layer, the Reference Governor algorithm was adopted. To model the dynamics of the reactor, a system identification algorithm, Dynamic Mode Decomposition, was utilized. To estimate the evolution of process variables that cannot be directly measured, the Unscented Kalman Filter was adopted, incorporating a nonlinear model of nuclear dynamics. The composition of these algorithms led to a numerical demonstration of constraint enforcement during a 40 % power drop transient. Adaptability of the proposed system was demonstrated by modifying the constraint values, and enforcing them during the transient. Robustness was also demonstrated by enforcing constraints under noisy environments.
Numerical Demonstration of Multiple Actuator Constraint Enforcement Algorithm for a Molten Salt Loop
Feb 04, 2022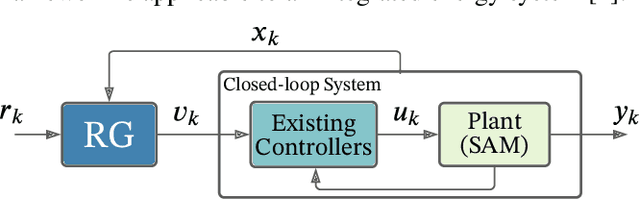
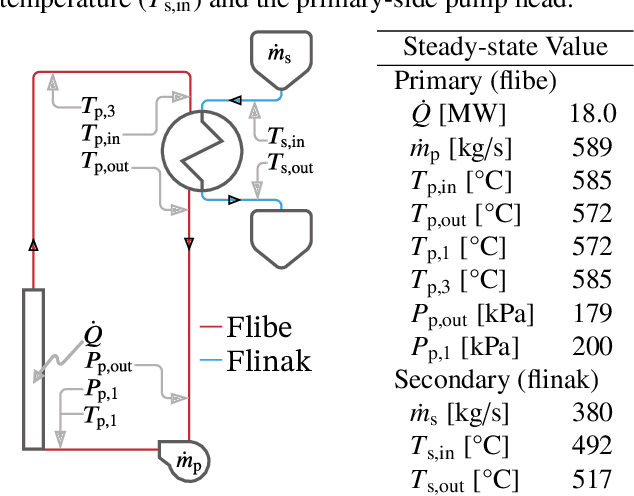
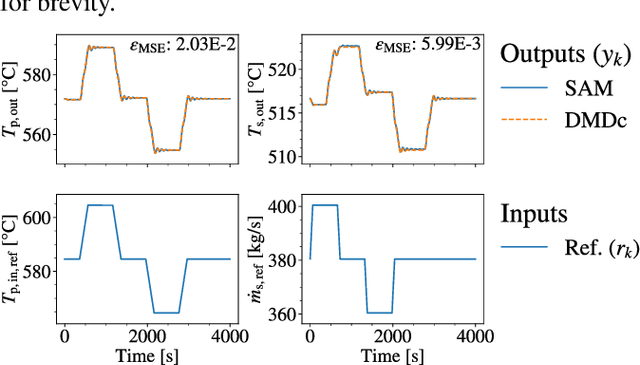
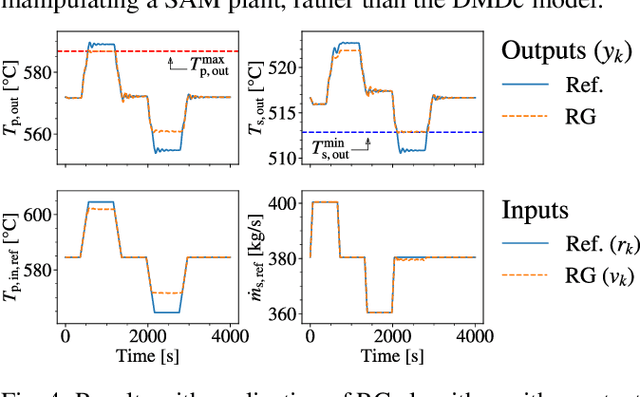
To advance the paradigm of autonomous operation for nuclear power plants, a data-driven machine learning approach to control is sought. Autonomous operation for next-generation reactor designs is anticipated to bolster safety and improve economics. However, any algorithms that are utilized need to be interpretable, adaptable, and robust. In this work, we focus on the specific problem of optimal control during autonomous operation. We will demonstrate an interpretable and adaptable data-driven machine learning approach to autonomous control of a molten salt loop. To address interpretability, we utilize a data-driven algorithm to identify system dynamics in state-space representation. To address adaptability, a control algorithm will be utilized to modify actuator setpoints while enforcing constant, and time-dependent constraints. Robustness is not addressed in this work, and is part of future work. To demonstrate the approach, we designed a numerical experiment requiring intervention to enforce constraints during a load-follow type transient.
Empirical Models for Multidimensional Regression of Fission Systems
May 30, 2021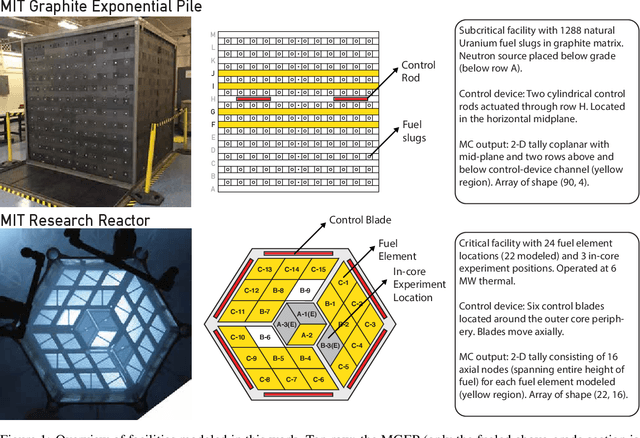

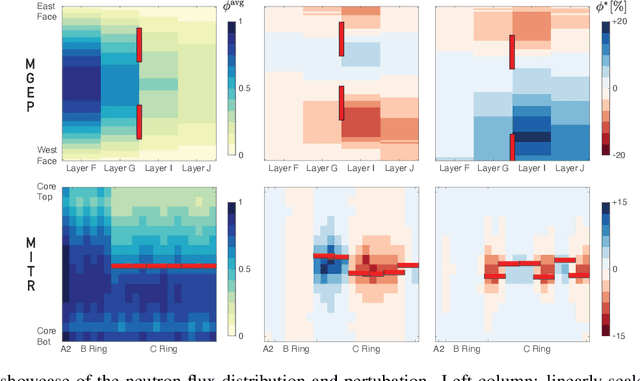
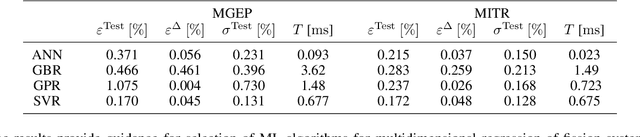
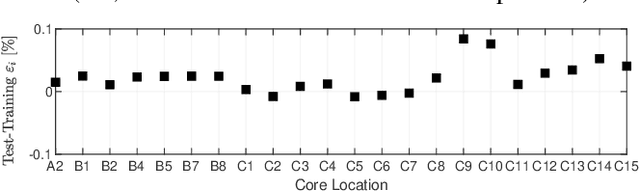
The development of next-generation autonomous control of fission systems, such as nuclear power plants, will require leveraging advancements in machine learning. For fission systems, accurate prediction of nuclear transport is important to quantify the safety margin and optimize performance. The state-of-the-art approach to this problem is costly Monte Carlo (MC) simulations to approximate solutions of the neutron transport equation. Such an approach is feasible for offline calculations e.g., for design or licensing, but is precluded from use as a model-based controller. In this work, we explore the use of Artificial Neural Networks (ANN), Gradient Boosting Regression (GBR), Gaussian Process Regression (GPR) and Support Vector Regression (SVR) to generate empirical models. The empirical model can then be deployed, e.g., in a model predictive controller. Two fission systems are explored: the subcritical MIT Graphite Exponential Pile (MGEP), and the critical MIT Research Reactor (MITR). Findings from this work establish guidelines for developing empirical models for multidimensional regression of neutron transport. An assessment of the accuracy and precision finds that the SVR, followed closely by ANN, performs the best. For both MGEP and MITR, the optimized SVR model exhibited a domain-averaged, test, mean absolute percentage error of 0.17 %. A spatial distribution of performance metrics indicates that physical regions of poor performance coincide with locations of largest neutron flux perturbation -- this outcome is mitigated by ANN and SVR. Even at local maxima, ANN and SVR bias is within experimental uncertainty bounds. A comparison of the performance vs. training dataset size found that SVR is more data-efficient than ANN. Both ANN and SVR achieve a greater than 7 order reduction in evaluation time vs. a MC simulation.
Deep Surrogate Models for Multi-dimensional Regression of Reactor Power
Jul 13, 2020

There is renewed interest in developing small modular reactors and micro-reactors. Innovation is necessary in both construction and operation methods of these reactors to be financially attractive. For operation, an area of interest is the development of fully autonomous reactor control. Significant efforts are necessary to demonstrate an autonomous control framework for a nuclear system, while adhering to established safety criteria. Our group has proposed and received support for demonstration of an autonomous framework on a subcritical system: the MIT Graphite Exponential Pile. In order to have a fast response (on the order of miliseconds), we must extract specific capabilities of general-purpose system codes to a surrogate model. Thus, we have adopted current state-of-the-art neural network libraries to build surrogate models. This work focuses on establishing the capability of neural networks to provide an accurate and precise multi-dimensional regression of a nuclear reactor's power distribution. We assess using a neural network surrogate against a previously validated model: an MCNP5 model of the MIT reactor. The results indicate that neural networks are an appropriate choice for surrogate models to implement in an autonomous reactor control framework. The MAPE across all test datasets was < 1.16 % with a corresponding standard deviation of < 0.77 %. The error is low, considering that the node-wise fission power can vary from 7 kW to 30 kW across the core.