 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNumerical Demonstration of Multiple Actuator Constraint Enforcement Algorithm for a Molten Salt Loop
Paper and Code
Feb 04, 2022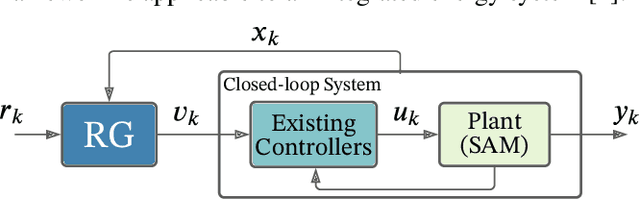
To advance the paradigm of autonomous operation for nuclear power plants, a data-driven machine learning approach to control is sought. Autonomous operation for next-generation reactor designs is anticipated to bolster safety and improve economics. However, any algorithms that are utilized need to be interpretable, adaptable, and robust. In this work, we focus on the specific problem of optimal control during autonomous operation. We will demonstrate an interpretable and adaptable data-driven machine learning approach to autonomous control of a molten salt loop. To address interpretability, we utilize a data-driven algorithm to identify system dynamics in state-space representation. To address adaptability, a control algorithm will be utilized to modify actuator setpoints while enforcing constant, and time-dependent constraints. Robustness is not addressed in this work, and is part of future work. To demonstrate the approach, we designed a numerical experiment requiring intervention to enforce constraints during a load-follow type transient.