 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Supervisory Control System for Autonomous Operation of Advanced Reactors
Sep 09, 2022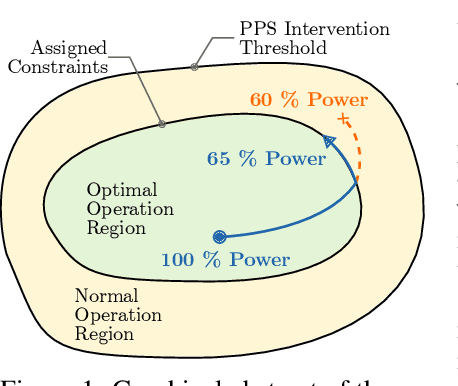
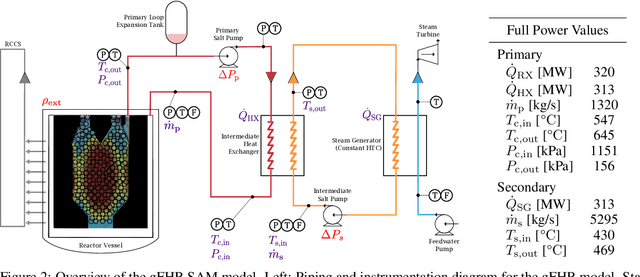
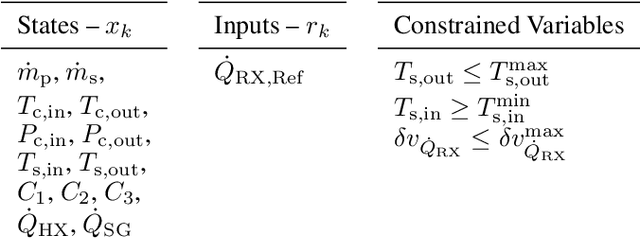

Advanced reactors deployed in the coming decades will face deregulated energy markets, and may adopt flexible operation to boost profitability. To aid in the transition from baseload to flexible operation paradigm, autonomous operation is sought. This work focuses on the control aspect of autonomous operation. Specifically, a hierarchical control system is designed to support constraint enforcement during routine operational transients. Within the system, data-driven modeling, physics-based state observation, and classical control algorithms are integrated to provide an adaptable and robust solution. A 320 MW Fluoride-cooled High-temperature Pebble-bed Reactor is the design basis for demonstrating the control system. The hierarchical control system consists of a supervisory layer and low-level layer. The supervisory layer receives requests to change the system's operating conditions, and accepts or rejects them based on constraints that have been assigned. Constraints are issued to keep the plant within an optimal operating region. The low-level layer interfaces with the actuators of the system to fulfill requested changes, while maintaining tracking and regulation duties. To accept requests at the supervisory layer, the Reference Governor algorithm was adopted. To model the dynamics of the reactor, a system identification algorithm, Dynamic Mode Decomposition, was utilized. To estimate the evolution of process variables that cannot be directly measured, the Unscented Kalman Filter was adopted, incorporating a nonlinear model of nuclear dynamics. The composition of these algorithms led to a numerical demonstration of constraint enforcement during a 40 % power drop transient. Adaptability of the proposed system was demonstrated by modifying the constraint values, and enforcing them during the transient. Robustness was also demonstrated by enforcing constraints under noisy environments.