 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDealing With Non-stationarity in Decentralized Cooperative Multi-Agent Deep Reinforcement Learning via Multi-Timescale Learning
Feb 06, 2023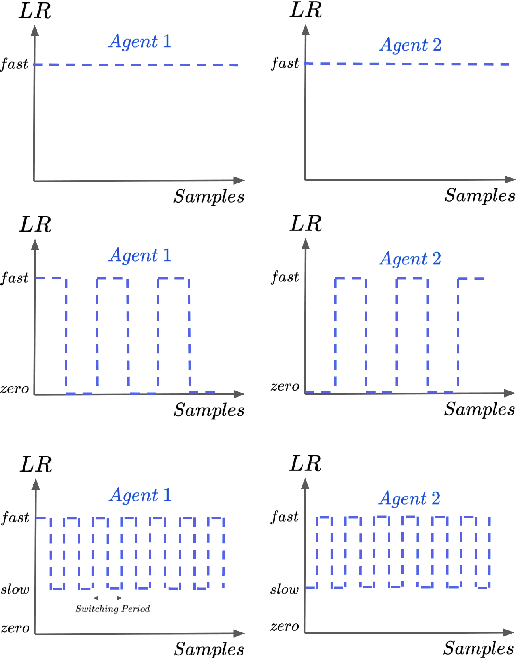
Decentralized cooperative multi-agent deep reinforcement learning (MARL) can be a versatile learning framework, particularly in scenarios where centralized training is either not possible or not practical. One of the key challenges in decentralized deep MARL is the non-stationarity of the learning environment when multiple agents are learning concurrently. A commonly used and efficient scheme for decentralized MARL is independent learning in which agents concurrently update their policies independent of each other. We first show that independent learning does not always converge, while sequential learning where agents update their policies one after another in a sequence is guaranteed to converge to an agent-by-agent optimal solution. In sequential learning, when one agent updates its policy, all other agent's policies are kept fixed, alleviating the challenge of non-stationarity due to concurrent updates in other agents' policies. However, it can be slow because only one agent is learning at any time. Therefore it might also not always be practical. In this work, we propose a decentralized cooperative MARL algorithm based on multi-timescale learning. In multi-timescale learning, all agents learn concurrently, but at different learning rates. In our proposed method, when one agent updates its policy, other agents are allowed to update their policies as well, but at a slower rate. This speeds up sequential learning, while also minimizing non-stationarity caused by other agents updating concurrently. Multi-timescale learning outperforms state-of-the-art decentralized learning methods on a set of challenging multi-agent cooperative tasks in the epymarl (papoudakis2020) benchmark. This can be seen as a first step towards more general decentralized cooperative deep MARL methods based on multi-timescale learning.
Continuous Coordination As a Realistic Scenario for Lifelong Learning
Mar 04, 2021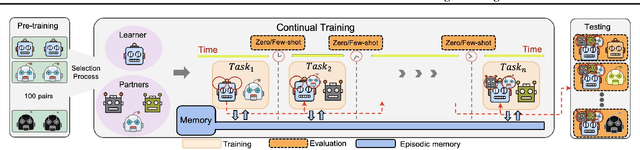
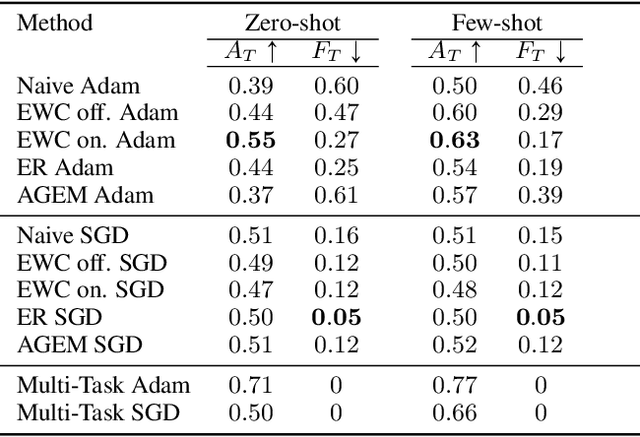
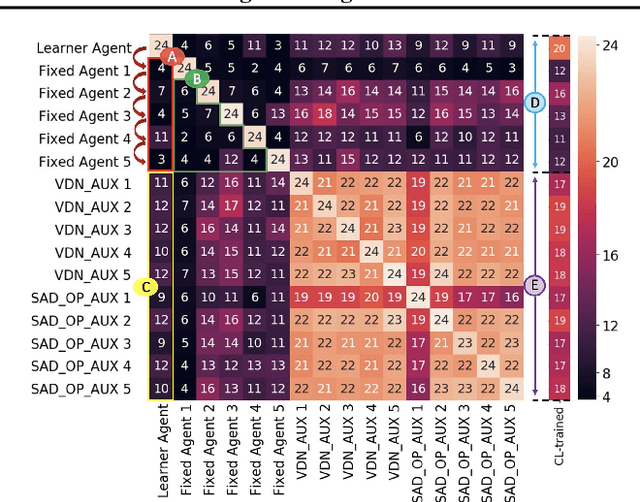

Current deep reinforcement learning (RL) algorithms are still highly task-specific and lack the ability to generalize to new environments. Lifelong learning (LLL), however, aims at solving multiple tasks sequentially by efficiently transferring and using knowledge between tasks. Despite a surge of interest in lifelong RL in recent years, the lack of a realistic testbed makes robust evaluation of LLL algorithms difficult. Multi-agent RL (MARL), on the other hand, can be seen as a natural scenario for lifelong RL due to its inherent non-stationarity, since the agents' policies change over time. In this work, we introduce a multi-agent lifelong learning testbed that supports both zero-shot and few-shot settings. Our setup is based on Hanabi -- a partially-observable, fully cooperative multi-agent game that has been shown to be challenging for zero-shot coordination. Its large strategy space makes it a desirable environment for lifelong RL tasks. We evaluate several recent MARL methods, and benchmark state-of-the-art LLL algorithms in limited memory and computation regimes to shed light on their strengths and weaknesses. This continual learning paradigm also provides us with a pragmatic way of going beyond centralized training which is the most commonly used training protocol in MARL. We empirically show that the agents trained in our setup are able to coordinate well with unseen agents, without any additional assumptions made by previous works.
PatchUp: A Regularization Technique for Convolutional Neural Networks
Jun 14, 2020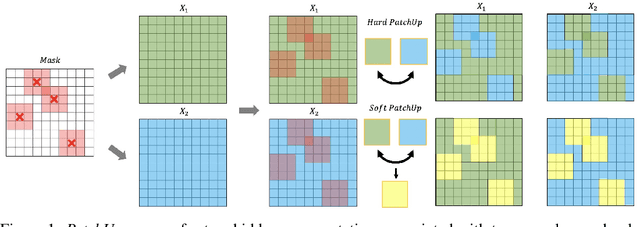
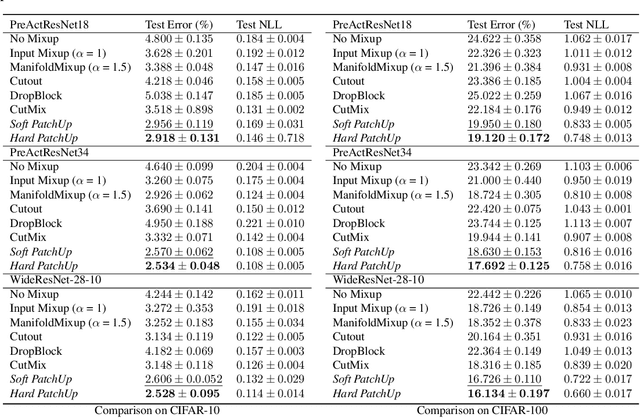
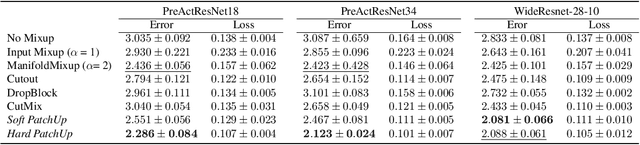
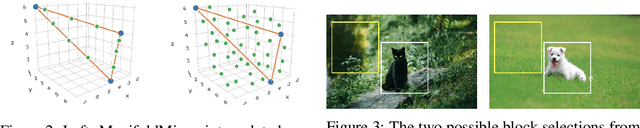
Large capacity deep learning models are often prone to a high generalization gap when trained with a limited amount of labeled training data. A recent class of methods to address this problem uses various ways to construct a new training sample by mixing a pair (or more) of training samples. We propose PatchUp, a hidden state block-level regularization technique for Convolutional Neural Networks (CNNs), that is applied on selected contiguous blocks of feature maps from a random pair of samples. Our approach improves the robustness of CNN models against the manifold intrusion problem that may occur in other state-of-the-art mixing approaches like Mixup and CutMix. Moreover, since we are mixing the contiguous block of features in the hidden space, which has more dimensions than the input space, we obtain more diverse samples for training towards different dimensions. Our experiments on CIFAR-10, CIFAR-100, and SVHN datasets with PreactResnet18, PreactResnet34, and WideResnet-28-10 models show that PatchUp improves upon, or equals, the performance of current state-of-the-art regularizers for CNNs. We also show that PatchUp can provide better generalization to affine transformations of samples and is more robust against adversarial attacks.